Integrating Uncertainty-Aware Human Motion Prediction into Graph-Based Manipulator Motion Planning
作者: Wansong Liu, Kareem Eltouny, Sibo Tian, Xiao Liang, Minghui Zheng
分类: cs.RO
发布日期: 2024-05-16
💡 一句话要点
提出一种融合不确定性感知的人类运动预测的图神经网络操作臂运动规划方法,用于人机协作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人机协作 运动规划 人类运动预测 不确定性量化 图神经网络
📋 核心要点
- 现有的人机协作运动规划方法缺乏对人类运动预测不确定性的考虑,可能导致安全隐患。
- 该方法利用神经运动预测模型,并量化其不确定性,将其融入图结构中,指导操作臂运动规划。
- 实验结果表明,该方法能有效提高人机协作的平滑性和安全性,验证了其有效性。
📝 摘要(中文)
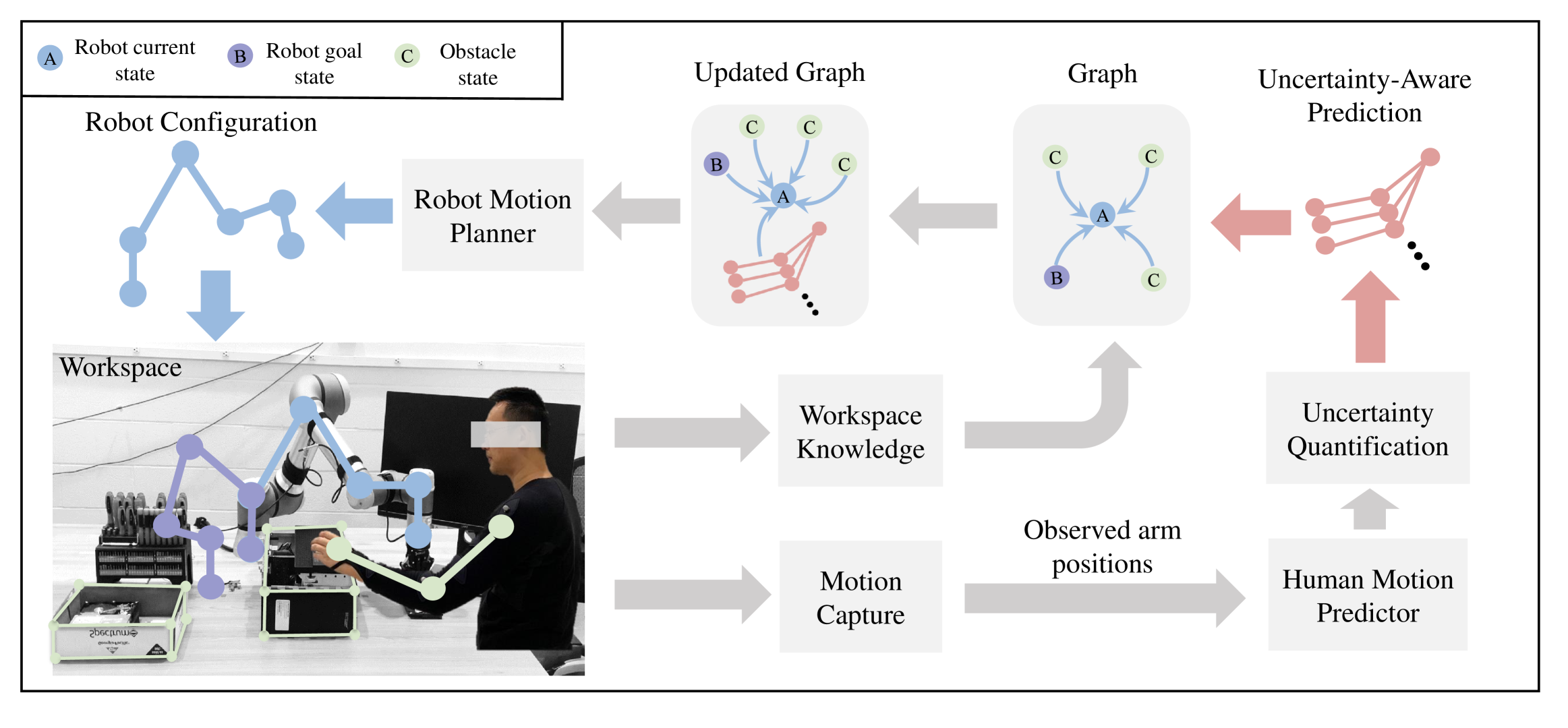
本文提出了一种人机协作(HRC)中人感知的运动规划框架,旨在为操作臂计算无碰撞运动,以实现与人类的协作任务。该框架采用神经人类运动预测模型,实现操作臂的主动规划。特别地,该方法量化神经预测模型的不确定性,而非盲目信任和利用预测的人类轨迹进行操作臂规划,从而进一步确保人类安全。此外,该方法将不确定性感知的预测集成到一个图中,该图捕获关键工作空间元素并说明它们的互连。然后,利用图神经网络对构建的图进行操作。因此,机器人运动规划考虑了工作空间中所有元素之间的依赖关系以及人类工人未来运动的潜在影响。实验结果表明,该方法在提高人机协作的平滑性和安全性方面具有优势。
🔬 方法详解
问题定义:论文旨在解决人机协作场景下,如何为操作臂规划安全、高效的运动轨迹的问题。现有方法通常直接使用人类运动预测结果,忽略了预测本身存在的不确定性,可能导致操作臂与人类发生碰撞,影响安全性。
核心思路:论文的核心思路是利用神经人类运动预测模型预测人类的运动轨迹,同时量化预测的不确定性,并将这种不确定性融入到操作臂的运动规划中。通过考虑预测的不确定性,操作臂可以更加谨慎地规划运动轨迹,避免潜在的碰撞风险。
技术框架:该框架主要包含以下几个模块:1) 人类运动预测模块:使用神经运动预测模型预测人类的未来运动轨迹。2) 不确定性量化模块:量化神经运动预测模型预测结果的不确定性。3) 图构建模块:构建一个图,节点表示工作空间中的关键元素(如机器人、人类、障碍物等),边表示这些元素之间的关系。4) 图神经网络规划模块:利用图神经网络在构建的图上进行操作臂的运动规划,同时考虑人类运动预测及其不确定性。
关键创新:该论文的关键创新在于将人类运动预测的不确定性融入到操作臂的运动规划中。具体来说,通过量化神经运动预测模型的不确定性,并将其作为图神经网络的输入,使得操作臂在规划运动轨迹时能够更加谨慎地考虑潜在的碰撞风险。
关键设计:论文的关键设计包括:1) 如何选择合适的神经运动预测模型;2) 如何有效地量化预测的不确定性;3) 如何构建能够有效表示工作空间元素及其关系的图;4) 如何设计图神经网络的结构和损失函数,使得操作臂能够学习到安全、高效的运动策略。具体的参数设置、损失函数、网络结构等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
论文通过实验验证了所提出的规划框架在提高人机协作的平滑性和安全性方面的优势。具体性能数据、对比基线以及提升幅度在摘要和论文中未明确给出,属于未知信息。但实验结果定性地表明,该方法能够生成更安全、更平滑的操作臂运动轨迹。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如再制造、装配线、医疗康复等。通过提高人机协作的安全性,可以有效提升生产效率,降低安全事故风险,并改善人机交互体验。未来,该技术有望进一步扩展到更复杂的协作任务和更动态的工作环境。
📄 摘要(原文)
There has been a growing utilization of industrial robots as complementary collaborators for human workers in re-manufacturing sites. Such a human-robot collaboration (HRC) aims to assist human workers in improving the flexibility and efficiency of labor-intensive tasks. In this paper, we propose a human-aware motion planning framework for HRC to effectively compute collision-free motions for manipulators when conducting collaborative tasks with humans. We employ a neural human motion prediction model to enable proactive planning for manipulators. Particularly, rather than blindly trusting and utilizing predicted human trajectories in the manipulator planning, we quantify uncertainties of the neural prediction model to further ensure human safety. Moreover, we integrate the uncertainty-aware prediction into a graph that captures key workspace elements and illustrates their interconnections. Then a graph neural network is leveraged to operate on the constructed graph. Consequently, robot motion planning considers both the dependencies among all the elements in the workspace and the potential influence of future movements of human workers. We experimentally validate the proposed planning framework using a 6-degree-of-freedom manipulator in a shared workspace where a human is performing disassembling tasks. The results demonstrate the benefits of our approach in terms of improving the smoothness and safety of HRC. A brief video introduction of this work is available as the supplemental materials.