Self-Supervised Learning of Dynamic Planar Manipulation of Free-End Cables
作者: Jonathan Wang, Huang Huang, Vincent Lim, Harry Zhang, Jeffrey Ichnowski, Daniel Seita, Yunliang Chen, Ken Goldberg
分类: cs.RO
发布日期: 2024-05-15 (更新: 2024-05-28)
💡 一句话要点
提出基于自监督学习的动态平面缆线操作方法,用于解决自由端缆线的操作问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 缆线操作 动态操作 自监督学习 机器人控制 物理模拟
📋 核心要点
- 自由端缆线的动态操作在家庭、仓库和制造工厂的缆线管理中具有应用价值,但精确控制具有挑战性。
- 论文提出一种基于自监督学习的方法,通过模拟器生成数据,学习缆线动态操作策略,实现精确的端点定位。
- 实验结果表明,该方法在物理机器人上优于传统方法,中值误差距离降低,证明了其有效性。
📝 摘要(中文)
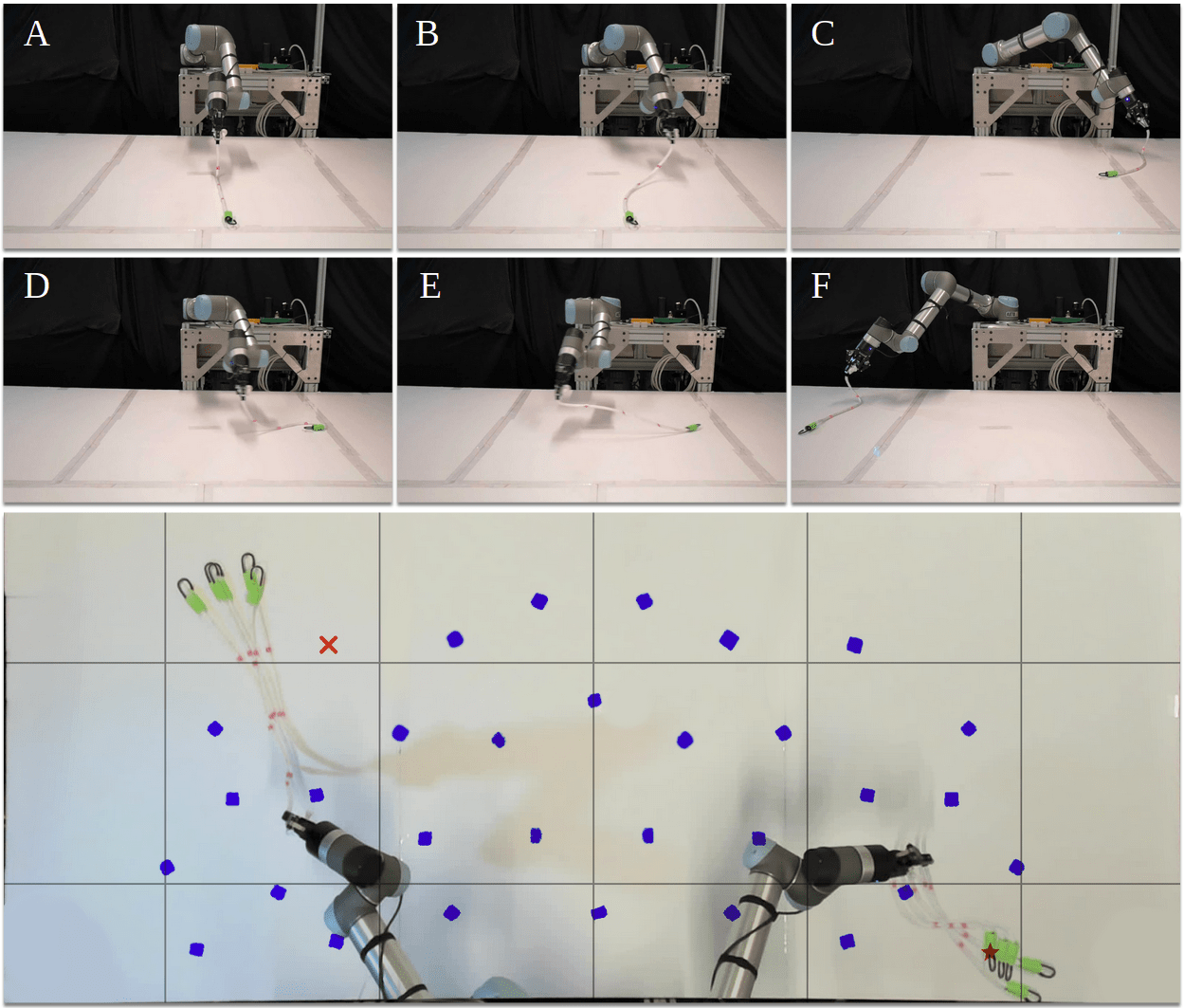
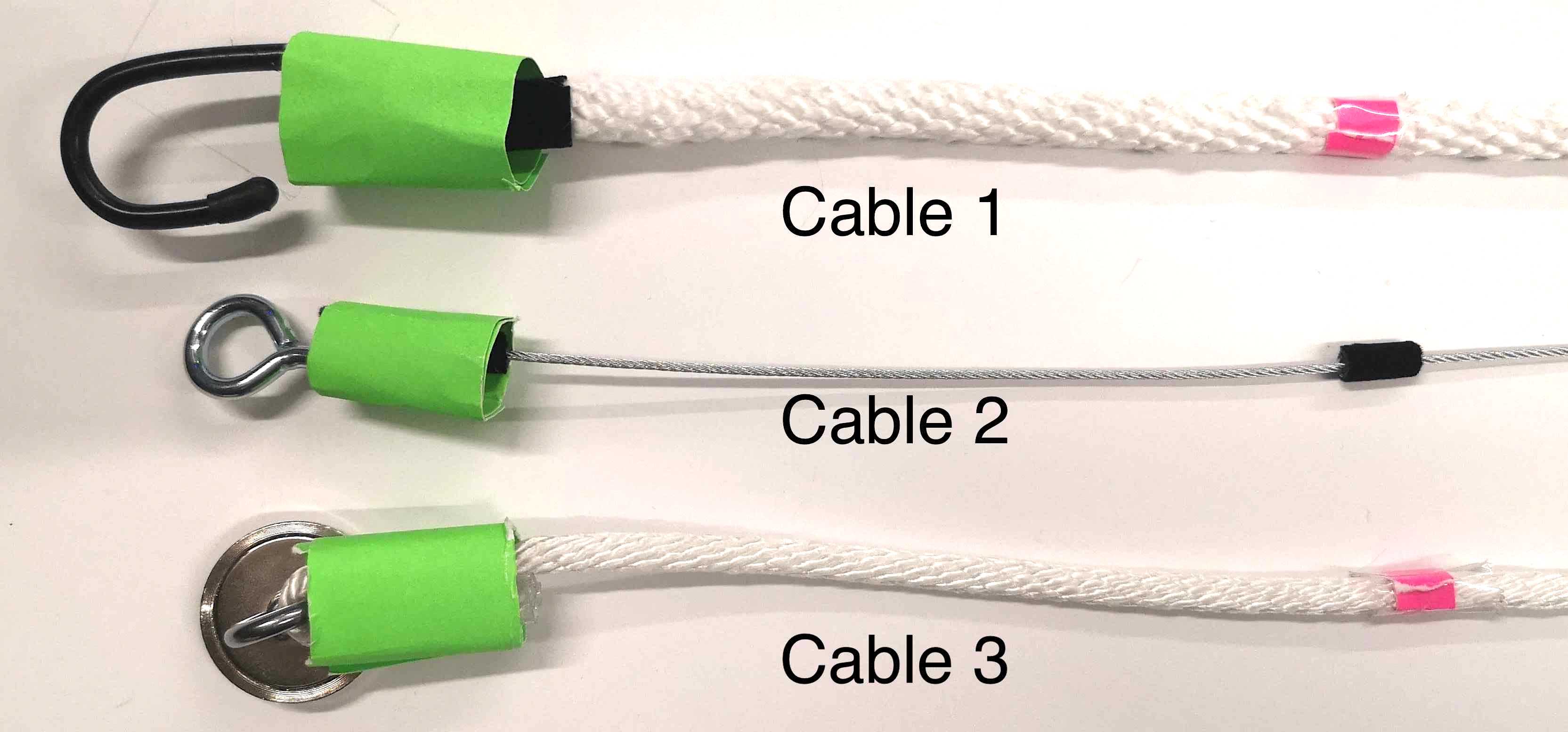
本文提出了一种基于监督学习的动态自由端缆线操作方法,旨在解决将缆线端点移动到指定目标位置的问题,该目标位置可能位于机器人末端执行器可达工作空间之外。作者构建了一个模拟器,并对其进行调整以紧密匹配物理缆线实验。然后,收集训练数据以学习动态缆线操作。使用3种缆线和一个物理UR5机器人进行评估。结果表明,在3种缆线上进行32x5次试验后,物理UR5机器人可以达到的中值误差距离范围为缆线长度的22%到35%,优于分析基线21%和高斯过程基线7%,且四分位距(IQR)更低。
🔬 方法详解
问题定义:论文旨在解决自由端缆线的动态操作问题,具体目标是控制缆线端点到达指定目标位置。现有方法,如解析方法和传统控制方法,难以处理缆线的复杂动态特性和形变,导致操作精度不高。此外,真实环境中的数据收集成本高昂,限制了监督学习方法的应用。
核心思路:论文的核心思路是利用模拟器生成大量的训练数据,通过监督学习训练一个能够预测缆线动态行为的模型。该模型能够学习到缆线操作的策略,从而实现精确的端点定位。通过模拟器训练,可以避免真实环境中数据收集的困难,降低成本。
技术框架:整体框架包括以下几个主要阶段:1) 构建缆线操作的物理模拟器,并进行参数调整,使其尽可能接近真实物理环境。2) 在模拟器中生成大量的训练数据,包括机器人末端执行器的动作和缆线端点的状态。3) 使用这些数据训练一个深度学习模型,该模型能够预测给定机器人动作下缆线端点的运动轨迹。4) 将训练好的模型部署到真实的UR5机器人上,进行实际的缆线操作实验。
关键创新:论文的关键创新在于利用自监督学习的方法,通过模拟器生成数据,避免了真实环境中数据收集的困难。此外,论文还提出了一种新的模型结构,能够更好地学习缆线的动态特性。通过模拟器到真实环境的迁移学习,实现了在真实机器人上的精确缆线操作。
关键设计:论文使用了UR5机器人作为实验平台。模拟器使用了一种基于物理的缆线模型,该模型考虑了缆线的弯曲、拉伸和扭转等特性。训练数据包括机器人末端执行器的位置、速度和加速度,以及缆线端点的位置和速度。损失函数使用了均方误差(MSE),用于衡量预测的缆线端点位置与真实位置之间的差异。网络结构使用了深度神经网络,包括卷积层和循环神经网络层,用于提取缆线的空间和时间特征。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在物理UR5机器人上能够实现精确的缆线端点定位,中值误差距离范围为缆线长度的22%到35%。与分析基线相比,该方法性能提升了21%,与高斯过程基线相比,性能提升了7%,并且具有更低的四分位距(IQR),表明该方法具有更好的鲁棒性。
🎯 应用场景
该研究成果可应用于自动化生产线中的缆线整理、医疗手术中的导管操作、以及家庭服务机器人中的电线管理等领域。通过精确控制缆线的运动,可以提高生产效率、降低人工成本,并改善用户体验。未来,该技术有望扩展到更复杂的缆线操作任务,例如缆线的缠绕、打结和解结等。
📄 摘要(原文)
Dynamic manipulation of free-end cables has applications for cable management in homes, warehouses and manufacturing plants. We present a supervised learning approach for dynamic manipulation of free-end cables, focusing on the problem of getting the cable endpoint to a designated target position, which may lie outside the reachable workspace of the robot end effector. We present a simulator, tune it to closely match experiments with physical cables, and then collect training data for learning dynamic cable manipulation. We evaluate with 3 cables and a physical UR5 robot. Results over 32x5 trials on 3 cables suggest that a physical UR5 robot can attain a median error distance ranging from 22% to 35% of the cable length among cables, outperforming an analytic baseline by 21% and a Gaussian Process baseline by 7% with lower interquartile range (IQR).