A Prompt-driven Task Planning Method for Multi-drones based on Large Language Model
作者: Yaohua Liu
分类: cs.RO, cs.AI, cs.CL
发布日期: 2024-05-14
💡 一句话要点
提出基于大语言模型的Prompt驱动多无人机任务规划方法,提升人机交互便捷性。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多无人机 任务规划 大语言模型 Prompt工程 人机交互
📋 核心要点
- 现有无人机任务规划方法在远程操作复杂性和人机交互便捷性方面存在不足,限制了多无人机系统的广泛应用。
- 该方法利用大语言模型,通过Prompt技术为多无人机系统提供引导信息,从而简化任务规划流程。
- 论文尚未提供实验结果或性能数据,因此该方法的实际效果和提升幅度未知。
📝 摘要(中文)
随着无人机技术的快速发展,多无人机应用在各个领域日益普及。然而,多无人机任务规划技术仍然面临着远程操作复杂和人机交互便捷性等挑战。为了解决这些问题,本文提出了一种基于大语言模型的Prompt驱动的多无人机任务规划方法。通过引入Prompt技术,为多无人机系统提供适当的提示信息。
🔬 方法详解
问题定义:论文旨在解决多无人机任务规划中远程操作复杂和人机交互不便的问题。现有方法通常需要专业人员进行复杂编程或手动控制,缺乏直观性和易用性,难以满足快速部署和灵活调整的需求。
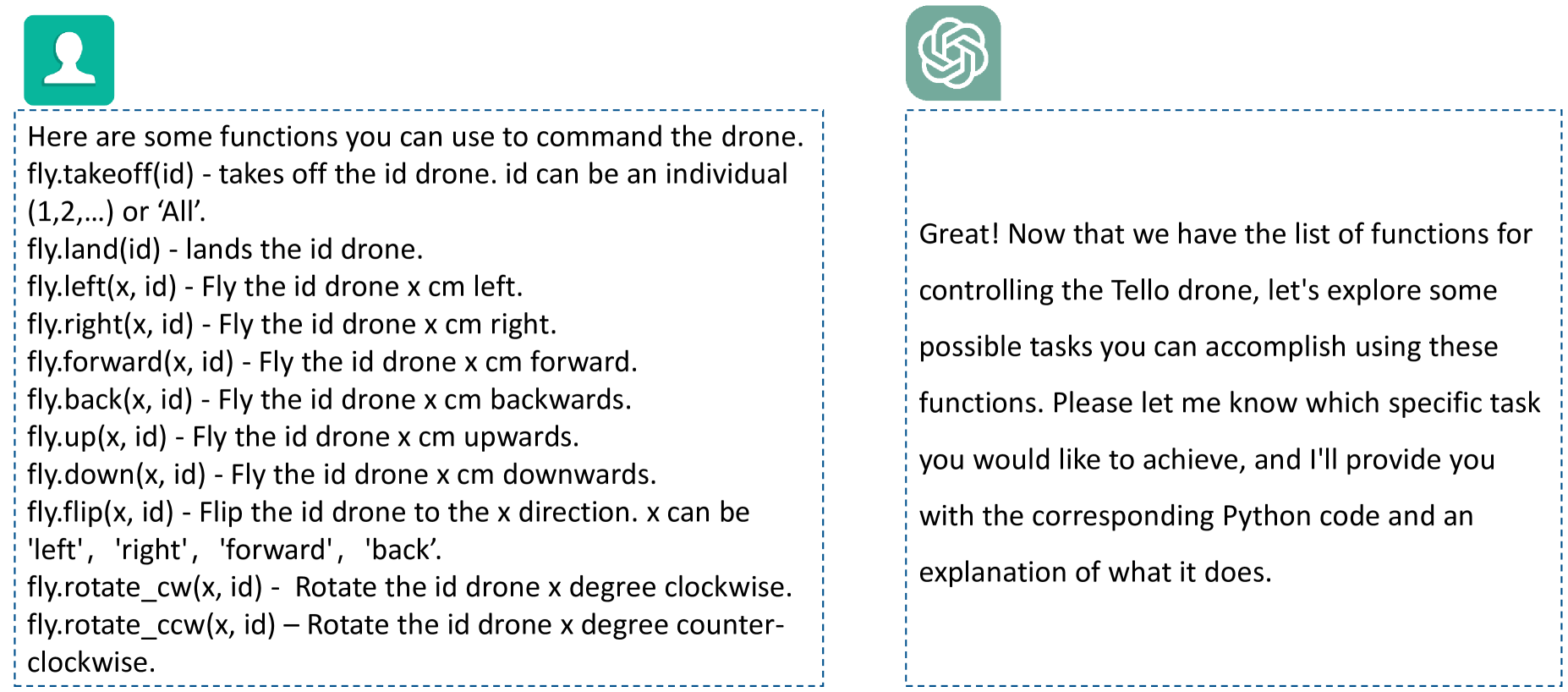
核心思路:论文的核心思路是利用大语言模型的自然语言理解和生成能力,将用户的任务需求转化为无人机可以理解和执行的指令。通过Prompt技术,引导大语言模型生成合适的任务规划方案,从而降低操作门槛,提高人机交互效率。
技术框架:整体框架包含用户输入模块、Prompt生成模块、大语言模型推理模块和无人机控制模块。用户通过自然语言描述任务需求,Prompt生成模块根据任务需求生成合适的Prompt,大语言模型根据Prompt生成任务规划方案,最后无人机控制模块将规划方案转化为无人机控制指令。
关键创新:该方法的主要创新在于将Prompt技术和大语言模型应用于多无人机任务规划,实现了自然语言驱动的任务规划。与传统方法相比,该方法无需编写复杂的代码,降低了操作难度,提高了任务规划的灵活性和适应性。
关键设计:论文中关于Prompt的具体设计、大语言模型的选择以及无人机控制指令的映射等技术细节未知。损失函数和网络结构等信息也未提及。这些细节将直接影响该方法的性能和实用性。
🖼️ 关键图片


📊 实验亮点
由于论文摘要中未提供实验结果,因此无法总结实验亮点。具体的性能数据、对比基线和提升幅度未知。
🎯 应用场景
该研究成果可应用于灾害救援、环境监测、农业植保、物流配送等领域。通过自然语言交互,用户可以快速部署多无人机系统执行复杂任务,提高工作效率和安全性。未来,该技术有望进一步发展,实现更加智能和自主的多无人机协同作业。
📄 摘要(原文)
With the rapid development of drone technology, the application of multi-drones is becoming increasingly widespread in various fields. However, the task planning technology for multi-drones still faces challenges such as the complexity of remote operation and the convenience of human-machine interaction. To address these issues, this paper proposes a prompt-driven task planning method for multi-drones based on large language models. By introducing the Prompt technique, appropriate prompt information is provided for the multi-drone system.