Vector Field-Guided Learning Predictive Control for Motion Planning of Mobile Robots with Uncertain Dynamics
作者: Yang Lu, Weijia Yao, Yongqian Xiao, Xinglong Zhang, Xin Xu, Yaonan Wang, Dingbang Xiao
分类: cs.RO
发布日期: 2024-05-14 (更新: 2025-09-22)
💡 一句话要点
提出基于向量场引导的学习预测控制,解决移动机器人在动态不确定环境下的运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 预测控制 向量场引导 深度学习 高斯过程 机器人导航 无人机 安全控制
📋 核心要点
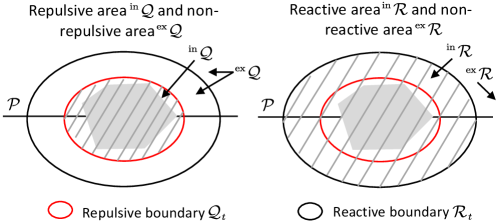
- 现有方法在复杂环境下,标准引导向量场(GVF)的积分曲线曲率不当,限制了移动机器人的运动能力。
- 提出双层VF-LPC方法,利用运动学GVF生成安全轨迹,并结合深度学习和高斯过程在线更新动力学模型不确定性。
- 在无人机和无人地面车辆上进行了实验,验证了VF-LPC在复杂环境中安全机动能力,提升了运动规划的可靠性。
📝 摘要(中文)
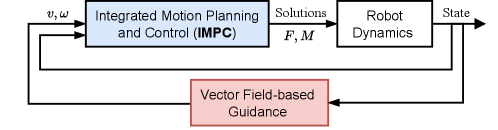
本文提出了一种双层向量场引导的学习预测控制(VF-LPC)方法,旨在提高移动机器人在复杂障碍环境中的安全机动能力。第一层,引导层,利用设计的运动学向量场生成安全期望轨迹,确保在障碍密集环境中的安全运动。第二层,集成运动规划与控制(IMPC)层,首先使用深度Koopman算子离线学习标称动力学模型,然后使用稀疏高斯过程(GPs)在线更新模型不确定性。学习到的动力学模型和一个基于博弈的安全屏障函数被整合到LPC框架中,以生成接近最优的规划方案。在四旋翼无人机和无人地面车辆上进行了大量的仿真和实际实验,结果表明VF-LPC能够使机器人安全地进行机动。
🔬 方法详解
问题定义:论文旨在解决移动机器人在障碍物密集环境中,由于系统动力学的不确定性和传统引导向量场的局限性,导致运动规划的安全性和可靠性难以保证的问题。现有方法难以兼顾安全性和运动能力,尤其是在动态不确定环境下。
核心思路:论文的核心思路是结合向量场引导和学习预测控制,利用向量场提供安全轨迹引导,并使用深度学习和高斯过程在线学习和更新动力学模型,从而提高预测控制的准确性和安全性。通过双层结构,解耦了轨迹生成和运动控制,提高了系统的鲁棒性。
技术框架:VF-LPC方法包含两个主要层级:引导层和集成运动规划与控制(IMPC)层。引导层使用设计的运动学GVF生成安全期望轨迹。IMPC层首先离线使用深度Koopman算子学习标称动力学模型,然后在线使用稀疏高斯过程(GPs)更新模型不确定性。最后,将学习到的动力学模型和基于博弈的安全屏障函数整合到LPC框架中,生成规划方案。
关键创新:主要创新点在于:1) 提出了一种双层VF-LPC框架,将向量场引导与学习预测控制相结合,提高了复杂环境下的安全机动能力。2) 使用深度Koopman算子离线学习动力学模型,并使用稀疏高斯过程在线更新模型不确定性,提高了模型预测的准确性。3) 引入基于博弈的安全屏障函数,增强了运动规划的安全性。
关键设计:深度Koopman算子的具体网络结构未知,但其作用是学习系统的标称动力学模型。稀疏高斯过程用于在线估计模型的不确定性,其核函数和稀疏化策略对性能有重要影响。基于博弈的安全屏障函数的设计需要仔细考虑机器人之间的交互,以确保安全性。LPC框架中的预测时域长度、控制输入约束等参数需要根据具体应用进行调整。
🖼️ 关键图片

📊 实验亮点
论文通过在四旋翼无人机和无人地面车辆上进行仿真和实际实验,验证了VF-LPC方法的有效性。实验结果表明,该方法能够使机器人在复杂障碍环境中安全地进行机动,并且在动态不确定性下仍能保持较高的规划成功率。具体的性能数据和对比基线在论文中进行了详细的展示,但此处未提供具体数值。
🎯 应用场景
该研究成果可应用于无人机自主导航、无人地面车辆自动驾驶、机器人集群协作等领域。通过提高机器人在复杂动态环境下的安全性和可靠性,可以降低事故风险,提高工作效率,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
In obstacle-dense scenarios, providing safe guidance for mobile robots is critical to improve the safe maneuvering capability. However, the guidance provided by standard guiding vector fields (GVFs) may limit the motion capability due to the improper curvature of the integral curve when traversing obstacles. On the other hand, robotic system dynamics are often time-varying, uncertain, and even unknown during the motion planning process. Therefore, many existing kinodynamic motion planning methods could not achieve satisfactory reliability in guaranteeing safety. To address these challenges, we propose a two-level Vector Field-guided Learning Predictive Control (VF-LPC) approach that improves safe maneuverability. The first level, the guiding level, generates safe desired trajectories using the designed kinodynamic GVF, enabling safe motion in obstacle-dense environments. The second level, the Integrated Motion Planning and Control (IMPC) level, first uses a deep Koopman operator to learn a nominal dynamics model offline and then updates the model uncertainties online using sparse Gaussian processes (GPs). The learned dynamics and a game-based safe barrier function are then incorporated into the LPC framework to generate near-optimal planning solutions. Extensive simulations and real-world experiments were conducted on quadrotor unmanned aerial vehicles and unmanned ground vehicles, demonstrating that VF-LPC enables robots to maneuver safely.