Toward Automated Programming for Robotic Assembly Using ChatGPT
作者: Annabella Macaluso, Nicholas Cote, Sachin Chitta
分类: cs.RO
发布日期: 2024-05-13
💡 一句话要点
利用ChatGPT实现机器人自编程,解决柔性装配难题
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人编程 大型语言模型 ChatGPT 自动化装配 柔性制造
📋 核心要点
- 现有机器人自适应装配编程依赖人工,耗时费力,且代码缺乏通用性与灵活性。
- 利用ChatGPT理解自然语言指令和生成代码的能力,实现机器人装配任务的自动编程。
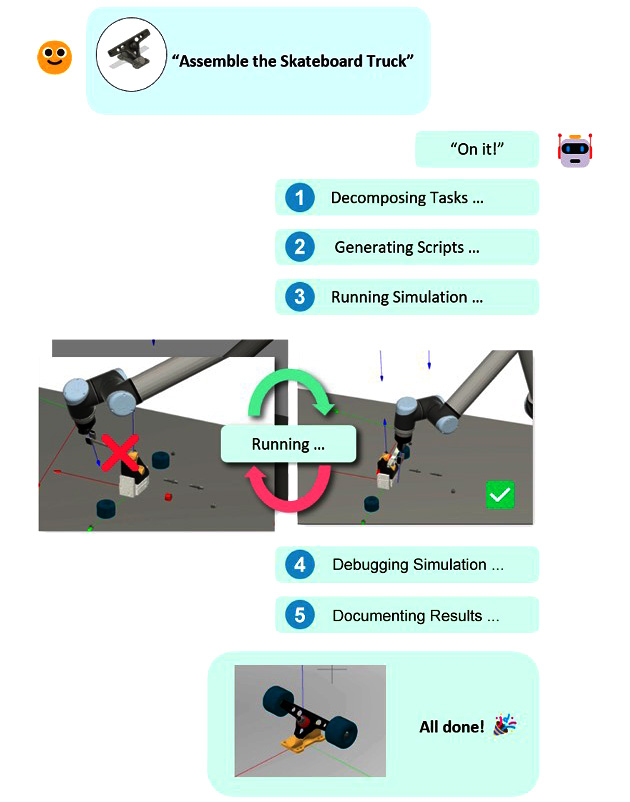
- 通过任务分解、代码生成、仿真调试等步骤,系统成功自主地为多种装配任务编程机器人。
📝 摘要(中文)
尽管技术取得了显著进步,但用于自适应装配的机器人编程过程仍然是劳动密集型的,需要多个领域的专业知识,并且通常导致特定于任务的、不灵活的代码。本文探讨了大型语言模型(LLM),如ChatGPT,在自动化这一过程中的潜力,利用它们理解自然语言指令、将示例推广到新任务以及编写代码的能力。在本文中,我们提出了如何利用这些能力并将其应用于制造业中的实际挑战。我们提出了一个新颖的系统,该系统使用ChatGPT来自动化机器人编程过程,以进行自适应装配,方法是将复杂任务分解为更简单的子任务,生成机器人控制代码,在模拟工作单元中执行代码,并调试语法和控制错误,例如碰撞。我们概述了该系统的架构以及任务分解和代码生成的策略。最后,我们展示了我们的系统如何在实际项目中自主地为各种装配任务编程机器人。
🔬 方法详解
问题定义:论文旨在解决机器人自适应装配编程的自动化问题。现有方法需要人工编写大量特定任务的代码,耗时且缺乏灵活性,难以适应生产线的快速变化。现有的机器人编程方法难以应对复杂装配任务,且需要专业的机器人编程知识。
核心思路:论文的核心思路是利用大型语言模型(LLM),特别是ChatGPT,理解自然语言描述的装配任务,并自动生成相应的机器人控制代码。通过将复杂的装配任务分解为更简单的子任务,并利用ChatGPT的代码生成能力,实现机器人编程的自动化。
技术框架:该系统包含以下主要模块:1) 任务分解模块:将复杂的装配任务分解为更小的、可管理的子任务。2) 代码生成模块:利用ChatGPT根据子任务的描述生成机器人控制代码。3) 仿真环境:在仿真环境中执行生成的代码,检测潜在的错误,如碰撞。4) 调试模块:根据仿真结果,利用ChatGPT对代码进行调试和优化。
关键创新:该论文的关键创新在于将大型语言模型应用于机器人编程领域,实现了机器人装配任务的自动编程。与传统方法相比,该方法无需人工编写大量代码,大大提高了编程效率和灵活性。此外,该系统还能够自动检测和修复代码中的错误,提高了代码的可靠性。
关键设计:任务分解策略至关重要,需要将复杂任务分解为LLM能够理解和处理的子任务。代码生成模块需要精心设计的提示工程(Prompt Engineering),以确保LLM生成正确的机器人控制代码。仿真环境需要能够准确模拟真实的工作环境,以便检测潜在的错误。调试模块需要能够有效地利用LLM的推理能力,定位并修复代码中的错误。
🖼️ 关键图片


📊 实验亮点
论文展示了该系统在多个实际装配任务中的应用,证明了其自主编程机器人的能力。虽然论文中没有提供具体的性能数据,但强调了该系统能够自动生成代码并进行调试,从而显著减少了人工编程的工作量。通过仿真环境,系统能够检测并修复潜在的碰撞等错误,提高了机器人操作的安全性。
🎯 应用场景
该研究成果可应用于各种工业自动化场景,尤其是在需要频繁更换产品型号或装配任务的柔性制造环境中。通过自动化机器人编程,可以显著降低生产成本,提高生产效率,并减少对专业机器人编程人员的依赖。未来,该技术有望进一步扩展到更复杂的机器人任务,如机器人操作、导航和人机协作。
📄 摘要(原文)
Despite significant technological advancements, the process of programming robots for adaptive assembly remains labor-intensive, demanding expertise in multiple domains and often resulting in task-specific, inflexible code. This work explores the potential of Large Language Models (LLMs), like ChatGPT, to automate this process, leveraging their ability to understand natural language instructions, generalize examples to new tasks, and write code. In this paper, we suggest how these abilities can be harnessed and applied to real-world challenges in the manufacturing industry. We present a novel system that uses ChatGPT to automate the process of programming robots for adaptive assembly by decomposing complex tasks into simpler subtasks, generating robot control code, executing the code in a simulated workcell, and debugging syntax and control errors, such as collisions. We outline the architecture of this system and strategies for task decomposition and code generation. Finally, we demonstrate how our system can autonomously program robots for various assembly tasks in a real-world project.