Path Planning and Motion Control for Accurate Positioning of Car-like Robots
作者: Jin Dai, Zejiang Wang, Yebin Wang, Rien Quirynen, Stefano Di Cairano
分类: cs.RO, eess.SY
发布日期: 2024-05-10 (更新: 2024-06-09)
备注: The paper needs further revision to guarantee technical correctness and conciseness
💡 一句话要点
提出基于连续曲率轨迹的运动规划与NMPC控制方案,提升类车机器人定位精度
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 类车机器人 路径规划 运动控制 连续曲率 模型预测控制
📋 核心要点
- 现有类车机器人路径规划方法生成的Reeds-Shepp路径存在曲率不连续问题,影响控制精度。
- 提出一种基于连续曲率(CC)轨迹的运动规划方法,结合RRT算法和CC转向技术生成平滑参考轨迹。
- 实验表明,在相同NMPC控制下,使用CC轨迹作为参考的系统比使用Reeds-Shepp轨迹的系统性能显著提升。
📝 摘要(中文)
本文研究了类车机器人的精确位置规划与控制问题。我们提出了一种集成方案,包含两个模块:一个运动规划器,利用快速探索随机树算法和连续曲率(CC)转向技术生成CC轨迹作为参考;以及一个非线性模型预测控制器(NMPC),用于精确跟踪参考轨迹。基于先前研究中的$μ$-切线条件,我们推导了特殊CC路径的显式存在条件,并开发了相关的计算方法,这些路径不仅具有与Reeds-Shepp路径相同的驾驶模式,而且包含无尖点的clothoid曲线转向。随后,我们创建了一个自动驾驶车辆泊车场景,其中NMPC努力跟踪参考轨迹。数值仿真验证了CC转向的可行性和计算效率。CarSim-Simulink联合仿真统计验证了,在完全相同的NMPC下,以CC轨迹作为参考的闭环系统明显优于使用Reeds-Shepp轨迹作为参考的情况。
🔬 方法详解
问题定义:论文旨在解决类车机器人在复杂环境下的高精度定位问题。现有方法,如基于Reeds-Shepp路径的规划,虽然能生成可行路径,但存在曲率不连续的问题,导致车辆在实际跟踪过程中产生较大的控制误差,难以实现精确停车或轨迹跟踪。
核心思路:论文的核心思路是利用连续曲率(CC)路径代替传统的Reeds-Shepp路径作为参考轨迹。CC路径具有曲率连续的特性,可以避免车辆在跟踪过程中产生突变,从而提高控制精度。同时,结合非线性模型预测控制(NMPC)进一步优化控制效果。
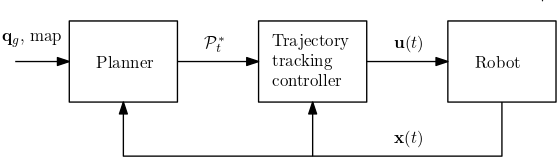
技术框架:整体框架包含两个主要模块:1) 运动规划器:采用快速探索随机树(RRT)算法,结合连续曲率(CC)转向技术,生成一条从起始点到目标点的CC参考轨迹。该轨迹满足车辆的运动学约束,并且曲率连续。2) 非线性模型预测控制器(NMPC):以CC参考轨迹为目标,根据车辆的动力学模型,预测车辆未来的状态,并通过优化控制输入,使车辆能够精确地跟踪参考轨迹。
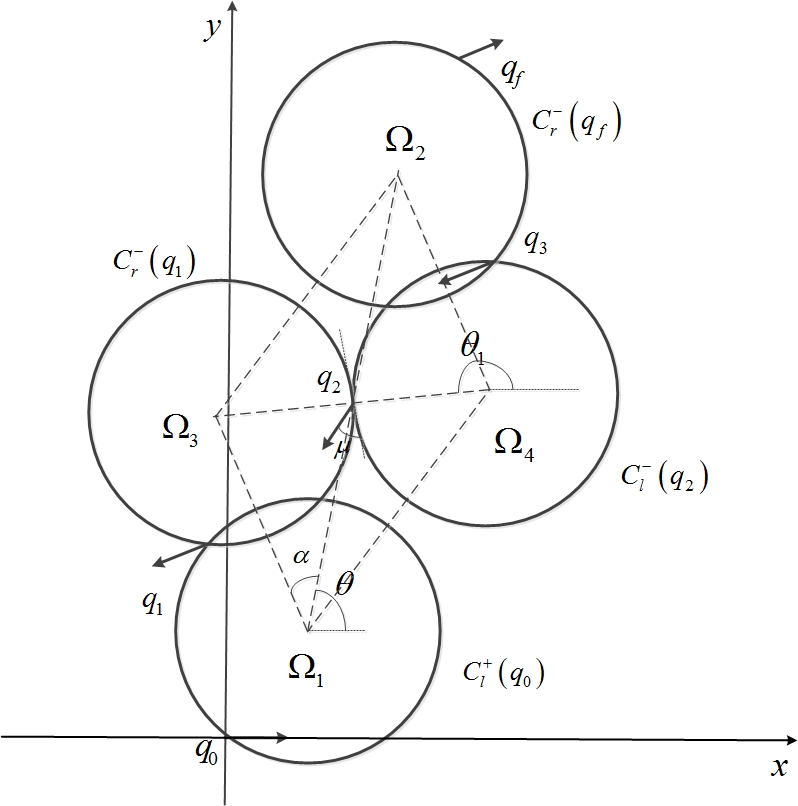
关键创新:论文的关键创新在于提出了一种新的CC路径生成方法,该方法基于$μ$-切线条件,推导了CC路径存在的显式条件,并开发了相应的计算方法。这种CC路径不仅具有与Reeds-Shepp路径相同的驾驶模式,而且由无尖点的clothoid曲线组成,保证了曲率的连续性。
关键设计:在CC路径生成方面,论文详细推导了满足$μ$-切线条件的clothoid曲线参数计算方法。在NMPC设计方面,需要根据具体的车辆动力学模型选择合适的模型预测范围、控制输入约束和状态约束。损失函数通常包含跟踪误差和控制输入的惩罚项,通过优化算法求解最优控制序列。
🖼️ 关键图片
📊 实验亮点
CarSim-Simulink联合仿真结果表明,在相同的NMPC控制器下,使用CC轨迹作为参考轨迹的闭环系统,其定位精度明显优于使用Reeds-Shepp轨迹作为参考轨迹的系统。具体性能提升数据未知,但论文强调了“substantially outperforms”的结果。
🎯 应用场景
该研究成果可应用于自动驾驶车辆的泊车辅助系统、自主导航机器人、以及其他需要高精度运动控制的场景。通过提供平滑的参考轨迹和精确的跟踪控制,可以提高车辆的行驶安全性、舒适性和效率,并为实现完全自主驾驶奠定基础。
📄 摘要(原文)
This paper investigates the planning and control for accurate positioning of car-like robots. We propose a solution that integrates two modules: a motion planner, facilitated by the rapidly-exploring random tree algorithm and continuous-curvature (CC) steering technique, generates a CC trajectory as a reference; and a nonlinear model predictive controller (NMPC) regulates the robot to accurately track the reference trajectory. Based on the $μ$-tangency conditions in prior art, we derive explicit existence conditions and develop associated computation methods for a special class of CC paths which not only admit the same driving patterns as Reeds-Shepp paths but also consist of cusp-free clothoid turns. Afterwards, we create an autonomous vehicle parking scenario where the NMPC endeavors to follow the reference trajectory. Feasibility and computational efficiency of the CC steering are validated by numerical simulation. CarSim-Simulink joint simulations statistically verify that with exactly same NMPC, the closed-loop system with CC trajectories as references substantially outperforms the case where Reeds-Shepp trajectories are used as references.