Narrow-Path, Dynamic Walking Using Integrated Posture Manipulation and Thrust Vectoring
作者: Kaushik Venkatesh Krishnamurthy, Chenghao Wang, Shreyansh Pitroda, Adarsh Salagame, Eric Sihite, Reza Nemovi, Alireza Ramezani, Morteza Gharib
分类: cs.RO, eess.SY
发布日期: 2024-05-09
备注: arXiv admin note: text overlap with arXiv:2312.12586
💡 一句话要点
提出融合姿态控制与推力矢量控制的动态步态方法,提升四足机器人狭窄路径导航能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 动态行走 姿态控制 推力矢量控制 最优控制 狭窄路径 HROM Matlab仿真
📋 核心要点
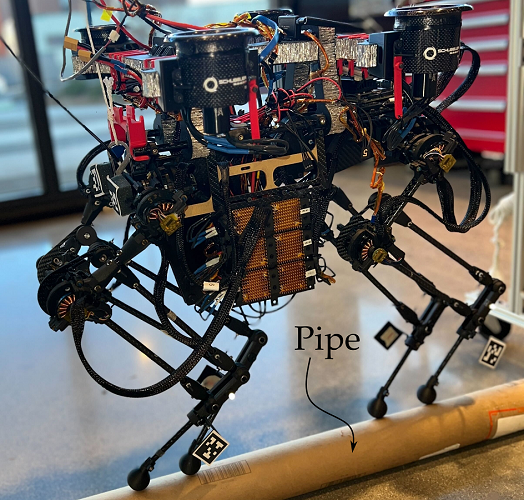
- 现有四足机器人难以在狭窄、动态环境中稳定行走,尤其是在管道或钢丝等复杂地形上。
- 该研究融合姿态控制与推力矢量控制,利用推进器稳定机器人身体,实现动态平衡。
- 通过 Matlab 仿真验证了所提出的建模和控制框架的有效性,为实际应用奠定基础。
📝 摘要(中文)
本研究致力于提升东北大学 Husky 四足机器人的导航能力,该机器人集成了姿态控制和推力矢量控制,使其能够穿越狭窄路径,例如在管道上行走和钢丝行走。Husky 配备了推进器,旨在稳定其在这些狭窄路径上动态行走时的身体。该项目涉及使用 HROM(Husky 降阶模型)对机器人进行建模,并开发一个最优控制框架。该框架基于 HROM 的多项式近似和配置方法,以推导出实现狭窄路径上动态行走所需的最佳推进器指令。通过使用 Matlab 进行的仿真验证了建模和控制设计方法的有效性。
🔬 方法详解
问题定义:现有四足机器人在狭窄路径上的动态行走面临稳定性和控制精度方面的挑战。传统的步态规划方法难以应对复杂地形和外部扰动,导致机器人容易跌倒或偏离目标路径。因此,需要一种能够有效利用机器人自身能力,实现稳定、精确导航的控制策略。
核心思路:本研究的核心思路是融合姿态控制和推力矢量控制,利用安装在机器人上的推进器产生额外的力矩,从而稳定机器人的身体姿态。通过优化推进器的控制指令,可以有效地抵抗外部扰动,并提高机器人在狭窄路径上的行走稳定性。
技术框架:该研究的技术框架主要包括以下几个模块:1) Husky 机器人降阶模型(HROM)的建立,用于简化机器人动力学方程;2) 基于多项式近似的 HROM 优化控制框架设计,用于生成最优的推进器控制指令;3) 基于配置方法的优化求解器,用于求解最优控制问题;4) Matlab 仿真环境,用于验证所提出的建模和控制方法的有效性。
关键创新:该研究的关键创新在于将推力矢量控制引入到四足机器人的动态行走控制中。通过合理地利用推进器产生的力矩,可以有效地提高机器人的稳定性和抗扰动能力,使其能够在狭窄路径上实现更加稳定、精确的行走。
关键设计:在模型简化方面,采用了降阶模型(HROM)以降低计算复杂度。在控制策略方面,采用了多项式近似方法来简化优化问题,并使用配置方法进行求解。推进器的具体参数(如位置、推力范围)以及优化目标函数(如最小化能量消耗、最大化稳定性)是需要仔细设计的关键参数。
🖼️ 关键图片


📊 实验亮点
该研究通过 Matlab 仿真验证了所提出的建模和控制方法的有效性。仿真结果表明,该方法能够有效地稳定机器人在狭窄路径上的行走姿态,并提高其抗扰动能力。虽然论文中没有给出具体的性能数据,但仿真结果表明该方法具有良好的应用前景。
🎯 应用场景
该研究成果可应用于搜救、勘探等领域,使四足机器人能够在复杂、危险的环境中执行任务。例如,在灾后救援中,机器人可以利用该技术在废墟中穿行,寻找幸存者。在工业巡检中,机器人可以在管道或高空作业平台上行走,进行设备维护和安全检查。未来,该技术有望进一步推广到其他类型的机器人,提升其在复杂环境中的适应性和自主性。
📄 摘要(原文)
This research concentrates on enhancing the navigational capabilities of Northeastern Universitys Husky, a multi-modal quadrupedal robot, that can integrate posture manipulation and thrust vectoring, to traverse through narrow pathways such as walking over pipes and slacklining. The Husky is outfitted with thrusters designed to stabilize its body during dynamic walking over these narrow paths. The project involves modeling the robot using the HROM (Husky Reduced Order Model) and developing an optimal control framework. This framework is based on polynomial approximation of the HROM and a collocation approach to derive optimal thruster commands necessary for achieving dynamic walking on narrow paths. The effectiveness of the modeling and control design approach is validated through simulations conducted using Matlab.