CushSense: Soft, Stretchable, and Comfortable Tactile-Sensing Skin for Physical Human-Robot Interaction
作者: Boxin Xu, Luoyan Zhong, Grace Zhang, Xiaoyu Liang, Diego Virtue, Rishabh Madan, Tapomayukh Bhattacharjee
分类: cs.RO
发布日期: 2024-05-06
备注: 8 pages, 8 figures, ICRA2024
💡 一句话要点
CushSense:用于人机物理交互的柔软、可拉伸、舒适的触觉传感皮肤
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉传感 人机交互 机器人皮肤 可拉伸传感器 电容传感
📋 核心要点
- 机器人需要全身触觉反馈以确保与环境进行安全的物理交互,尤其是在人机协作场景中。
- CushSense通过使用可拉伸织物和超弹性聚合物,监测皮肤变形引起的电容变化来识别接触,从而实现触觉感知。
- 实验结果表明,CushSense具有高传感精度和耐用性,并且用户研究表明其在辅助任务中具有良好的安全性和舒适性。
📝 摘要(中文)
本文介绍了一种名为CushSense的基于织物的柔软且可拉伸的触觉传感皮肤,专为物理人机交互(pHRI)任务而设计,例如机器人照护。CushSense利用可拉伸织物和超弹性聚合物,通过监测皮肤变形引起的电容变化来识别接触。CushSense具有成本效益(每个触觉单元约7美元)且易于制造。我们详细介绍了传感器的设计和制造过程,并进行了特性分析,突出了其高传感精度(相对误差0.58%)和耐用性(1000次交互后精度下降0.054%)。我们还进行了一项用户研究,强调了其在肢体操作辅助任务中的感知安全性和舒适性。我们在https://emprise.cs.cornell.edu/cushsense上开源了所有传感器相关资源。
🔬 方法详解
问题定义:现有机器人触觉传感皮肤在成本、易用性、舒适性和耐用性方面存在不足,限制了其在人机物理交互中的应用。特别是,在机器人照护等场景中,需要柔软、可拉伸且舒适的触觉传感皮肤,以确保交互过程的安全性和用户体验。
核心思路:CushSense的核心思路是利用可拉伸织物和超弹性聚合物,构建一种基于电容变化的触觉传感器。通过监测皮肤变形引起的电容变化,可以识别接触的位置和力度。这种设计思路旨在实现低成本、易制造、高精度和高耐用性的触觉传感皮肤。
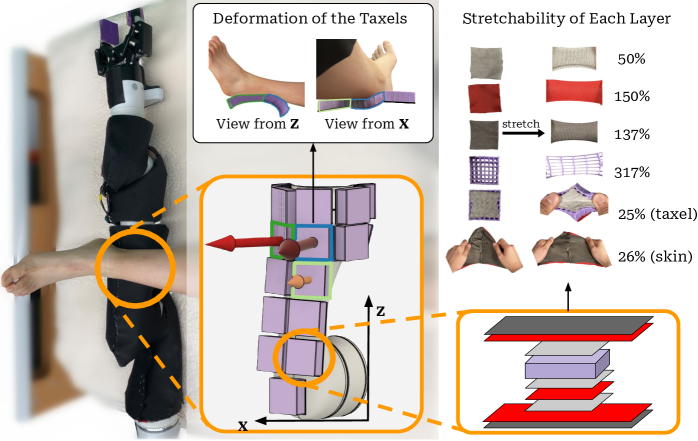
技术框架:CushSense的整体架构包括以下几个主要部分:1) 可拉伸织物基底,提供柔软性和可拉伸性;2) 超弹性聚合物电介质层,用于实现电容变化;3) 导电电极,用于测量电容值;4) 数据采集和处理单元,用于将电容值转换为触觉信息。整个流程包括:施加压力 -> 皮肤变形 -> 电容变化 -> 数据采集 -> 信号处理 -> 触觉信息。
关键创新:CushSense的关键创新在于其材料选择和结构设计。使用可拉伸织物和超弹性聚合物,使得传感器具有良好的柔软性和可拉伸性,能够更好地适应人体曲线和运动。此外,基于电容变化的传感原理,使得传感器具有较高的灵敏度和精度。
关键设计:CushSense的关键设计包括:1) 触觉单元(taxel)的尺寸和形状,需要根据应用场景进行优化;2) 电极的材料和布局,需要保证良好的导电性和均匀的电场分布;3) 超弹性聚合物的配方和厚度,需要平衡灵敏度和耐用性;4) 数据采集和处理算法,需要消除噪声和漂移,提高传感精度。
🖼️ 关键图片


📊 实验亮点
CushSense具有高传感精度和耐用性。实验结果表明,CushSense的相对误差为0.58%,在1000次交互后精度下降仅为0.054%。用户研究表明,CushSense在肢体操作辅助任务中具有良好的安全性和舒适性。此外,CushSense的成本较低,每个触觉单元约7美元,易于制造。
🎯 应用场景
CushSense具有广泛的应用前景,包括机器人照护、康复机器人、虚拟现实、人机协作等领域。它可以为机器人提供全身触觉反馈,使其能够更安全、更自然地与人类进行交互。在机器人照护领域,CushSense可以帮助机器人更好地感知用户的状态和需求,提供更个性化的服务。在虚拟现实领域,CushSense可以增强用户的沉浸感和交互体验。
📄 摘要(原文)
Whole-arm tactile feedback is crucial for robots to ensure safe physical interaction with their surroundings. This paper introduces CushSense, a fabric-based soft and stretchable tactile-sensing skin designed for physical human-robot interaction (pHRI) tasks such as robotic caregiving. Using stretchable fabric and hyper-elastic polymer, CushSense identifies contacts by monitoring capacitive changes due to skin deformation. CushSense is cost-effective ($\sim$US\$7 per taxel) and easy to fabricate. We detail the sensor design and fabrication process and perform characterization, highlighting its high sensing accuracy (relative error of 0.58%) and durability (0.054% accuracy drop after 1000 interactions). We also present a user study underscoring its perceived safety and comfort for the assistive task of limb manipulation. We open source all sensor-related resources on https://emprise.cs.cornell.edu/cushsense.