Wall-Climbing Performance of Gecko-inspired Robot with Soft Feet and Digits enhanced by Gravity Compensation
作者: Bingcheng Wang, Zhiyuan Weng, Haoyu Wang, Shuangjie Wang, Zhouyi Wang, Zhendong Dai, Ardian Jusufi
分类: cs.RO
发布日期: 2024-05-04
💡 一句话要点
提出重力补偿策略,提升壁虎机器人软足在复杂表面的攀爬性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 壁虎机器人 重力补偿 软足 攀爬机器人 姿态控制
📋 核心要点
- 多足机器人攀爬时,低腿部刚度易受重力影响,导致姿态偏差和末端执行器附着不稳定。
- 借鉴壁虎附着姿势差异,提出前馈重力补偿(FGC)策略,校正姿态并提升附着稳定性。
- 实验表明,FGC策略显著提升了四足机器人在倒置表面的攀爬成功率和运动速度。
📝 摘要(中文)
在腿部刚度较低的多足树栖机器人运动中,重力会导致身体姿态偏离期望构型,影响摆动腿末端执行器与攀爬表面之间的接触角。本文研究了外部力作用下腿部刚度增强模型中期望足部位置与实际足部位置之间的关系,重点关注此类机器人末端执行器在攀爬表面上附着不可靠的难题。受死亡和活体壁虎天花板附着姿势差异的启发,前馈补偿支撑相腿是解决此问题的关键。提出了一种前馈重力补偿(FGC)策略,辅以腿部协调,通过减少身体倾斜来校正受重力影响的身体姿态并提高附着稳定性。使用四足攀爬机器人EF-I作为实验平台验证了该策略的有效性。在倒置表面(天花板行走)上的实验验证突出了FGC策略的优势,证明了其在提高稳定性和确保可靠的末端执行器附着方面的作用,无需外部辅助。在实验中,没有FGC的机器人仅在10次试验中完成了3次,而具有FGC的机器人在相同的试验中实现了100%的成功率。使用FGC时,速度明显更快,在小跑步态中达到9.2 mm / s。这突显了所提出的FGC策略在克服腿部刚度较低的机器人中末端执行器附着不一致相关的挑战方面的潜力,从而即使在倒置身体姿态下也能促进稳定的运动。
🔬 方法详解
问题定义:论文旨在解决低腿部刚度多足攀爬机器人因重力影响导致的姿态偏差和末端执行器附着不稳定问题。现有方法难以有效补偿重力影响,导致机器人难以在复杂表面稳定攀爬,尤其是在倒置表面。
核心思路:核心思路是采用前馈重力补偿(FGC)策略,通过预测并补偿重力对机器人姿态的影响,从而提高末端执行器的附着稳定性和攀爬性能。该策略模仿了活体壁虎和死亡壁虎在天花板附着姿势上的差异,认为主动补偿支撑腿是关键。
技术框架:整体框架包括以下几个关键部分:1)腿部刚度增强模型,用于分析外部力作用下期望足部位置与实际足部位置之间的关系;2)前馈重力补偿(FGC)模块,用于预测并补偿重力对机器人姿态的影响;3)腿部协调模块,用于协调各腿的运动,确保机器人的平衡和稳定。整个流程是先通过模型分析重力影响,然后通过FGC模块进行补偿,最后通过腿部协调模块实现稳定运动。
关键创新:最重要的创新点在于提出了前馈重力补偿(FGC)策略,该策略能够主动预测并补偿重力对机器人姿态的影响,从而显著提高末端执行器的附着稳定性和攀爬性能。与传统的反馈控制方法相比,FGC策略能够更快速、更准确地补偿重力影响,避免了因反馈滞后导致的姿态偏差。
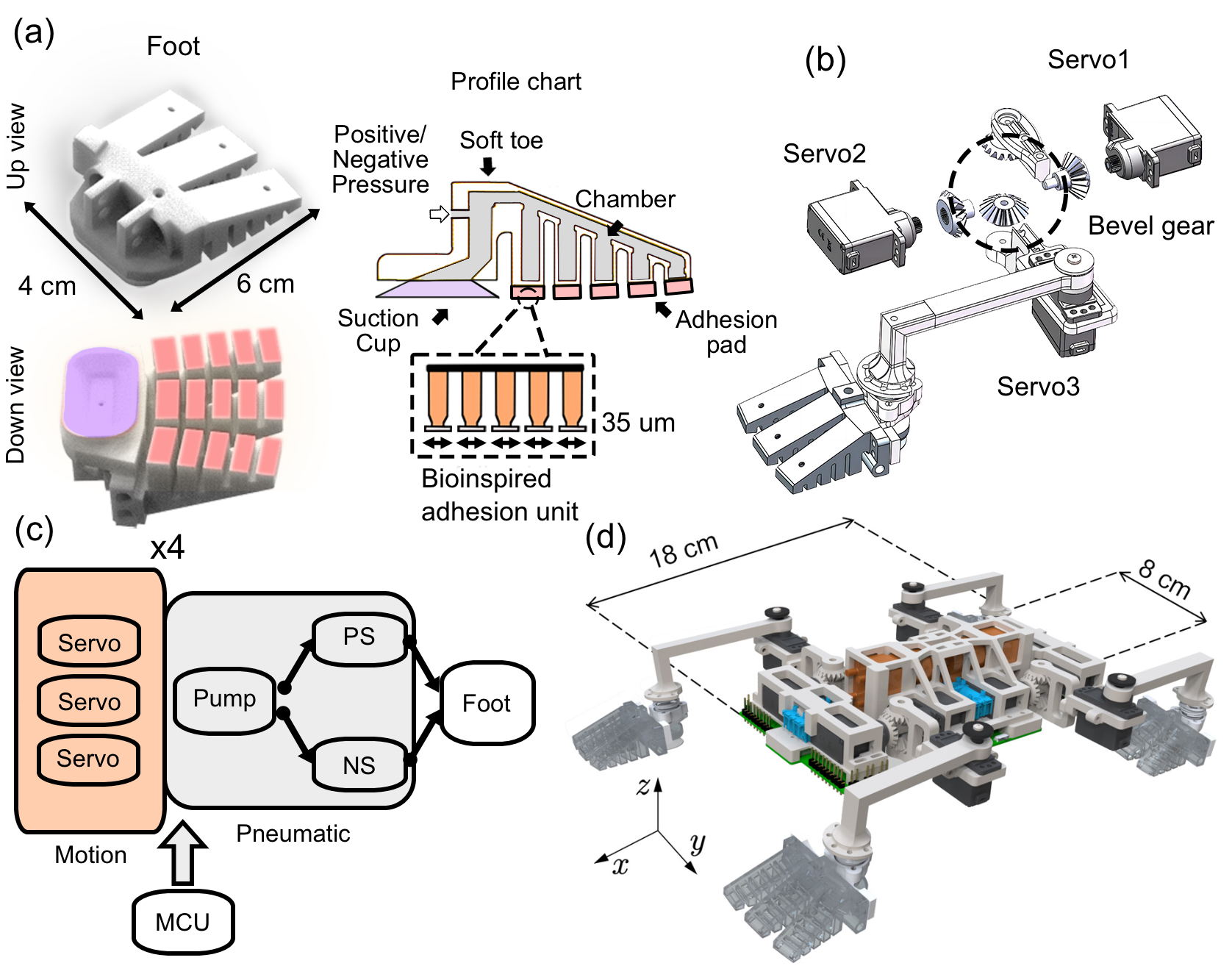
关键设计:关键设计包括:1)FGC模块的具体实现,需要精确建模机器人的动力学特性,并预测重力对各关节的影响;2)腿部协调模块的设计,需要考虑各腿之间的运动约束,确保机器人的平衡和稳定;3)实验中,机器人EF-I的软足和数字化设计,增强了与表面的附着力。
🖼️ 关键图片


📊 实验亮点
实验结果表明,采用FGC策略的机器人EF-I在倒置表面上的攀爬成功率达到100%,而未采用FGC策略的机器人仅为30%。同时,采用FGC策略的机器人在小跑步态下的运动速度达到9.2 mm/s,显著提升了攀爬效率。
🎯 应用场景
该研究成果可应用于复杂环境下的机器人攀爬任务,例如高空作业、灾难救援、建筑物检测等。通过提高机器人在垂直和倒置表面的运动能力,可以使其在人类难以到达的区域执行任务,具有重要的实际应用价值和潜在的社会效益。
📄 摘要(原文)
Gravitational forces can induce deviations in body posture from desired configurations in multi-legged arboreal robot locomotion with low leg stiffness, affecting the contact angle between the swing leg's end-effector and the climbing surface during the gait cycle. The relationship between desired and actual foot positions is investigated here in a leg-stiffness-enhanced model under external forces, focusing on the challenge of unreliable end-effector attachment on climbing surfaces in such robots. Inspired by the difference in ceiling attachment postures of dead and living geckos, feedforward compensation of the stance phase legs is the key to solving this problem. A feedforward gravity compensation (FGC) strategy, complemented by leg coordination, is proposed to correct gravity-influenced body posture and improve adhesion stability by reducing body inclination. The efficacy of this strategy is validated using a quadrupedal climbing robot, EF-I, as the experimental platform. Experimental validation on an inverted surface (ceiling walking) highlight the benefits of the FGC strategy, demonstrating its role in enhancing stability and ensuring reliable end-effector attachment without external assistance. In the experiment, robots without FGC only completed in 3 out of 10 trials, while robots with FGC achieved a 100\% success rate in the same trials. The speed was substantially greater with FGC, achieved 9.2 mm/s in the trot gait. This underscores the proposed potential of FGC strategy in overcoming the challenges associated with inconsistent end-effector attachment in robots with low leg stiffness, thereby facilitating stable locomotion even at inverted body attitude.