A Convex Formulation of the Soft-Capture Problem
作者: Ibrahima Sory Sow, Geordan Gutow, Howie Choset, Zachary Manchester
分类: cs.RO, eess.SY, math.OC
发布日期: 2024-05-01
备注: Accepted to ISpaRo24
💡 一句话要点
提出一种凸优化算法,用于快速软捕获翻滚的非合作空间目标。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软捕获 轨迹优化 凸优化 空间机器人 非合作目标
📋 核心要点
- 现有方法难以在计算效率和轨迹安全性之间取得平衡,尤其是在处理翻滚的非合作目标时。
- 该论文提出了一种基于凸优化的方法,通过凸松弛和顺序凸规划,保证轨迹的安全性和动态可行性。
- 仿真结果表明,该算法在高达10°/s的翻滚速率下依然有效,验证了其性能和鲁棒性。
📝 摘要(中文)
本文提出了一种快速轨迹优化算法,用于软捕获非合作的、翻滚的空间目标。该算法为六自由度的服务航天器生成安全、动态可行且燃料消耗最小的轨迹,以在服务航天器和目标物体的预定义位置之间实现软捕获(接触时接近零的相对速度)。通过强制执行视场约束的凸松弛,然后使用顺序凸规划来校正轨迹以进行避碰,从而解决一个凸问题。这些优化问题可以使用标准的二阶锥规划求解器来解决,这使得该算法既快速又实用,可以部署在飞行软件中。通过仿真,在高达10°/s的物体翻滚速率范围内,验证了该算法的性能和鲁棒性。
🔬 方法详解
问题定义:该论文旨在解决航天器软捕获非合作、翻滚空间目标的问题。现有方法在处理此类问题时,往往难以兼顾轨迹的安全性、动态可行性和计算效率,尤其是在目标物体具有较高翻滚速率时,避碰和燃料优化变得更加困难。
核心思路:论文的核心思路是将复杂的轨迹优化问题转化为一个凸优化问题,从而能够利用高效的凸优化求解器快速找到最优解。通过凸松弛技术处理非凸约束,并采用顺序凸规划迭代优化轨迹,以满足安全性、动态可行性和燃料消耗最小化的要求。
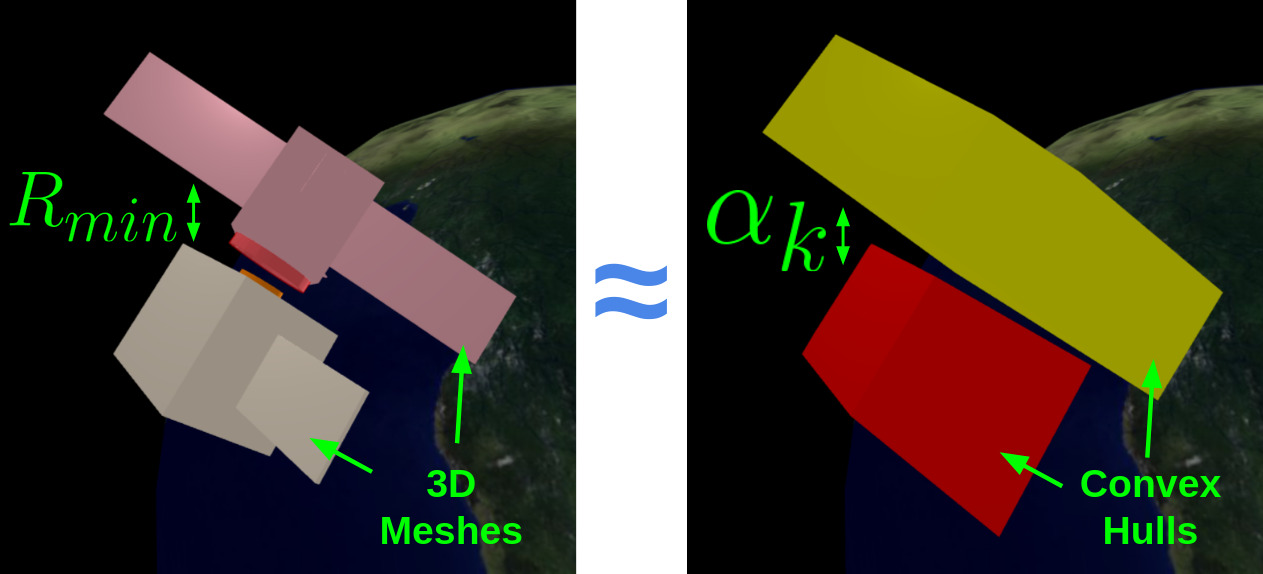
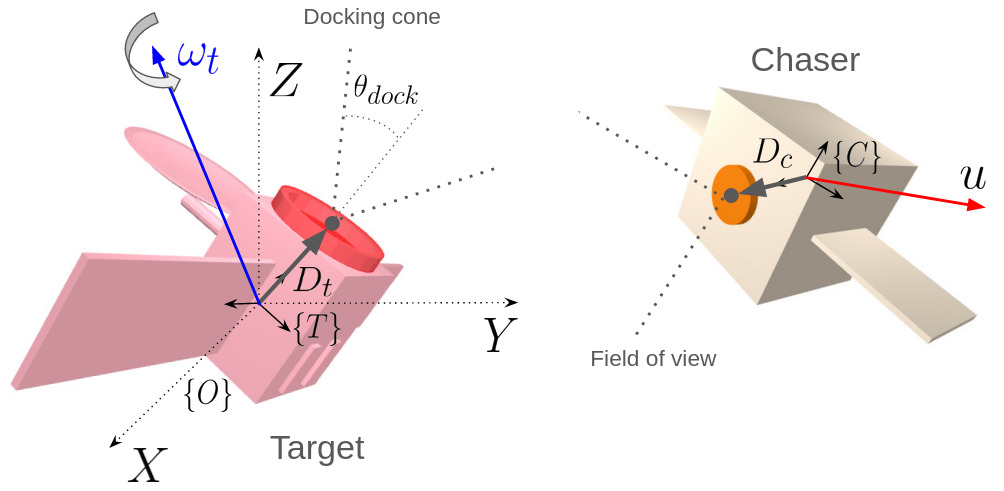
技术框架:该算法主要包含以下几个阶段:1) 定义服务航天器和目标物体的动力学模型;2) 建立轨迹优化问题的数学模型,包括目标函数(燃料消耗最小化)和约束条件(安全性、动态可行性、视场约束等);3) 对非凸的视场约束进行凸松弛;4) 利用二阶锥规划求解器求解凸优化问题,得到初始轨迹;5) 使用顺序凸规划对初始轨迹进行迭代优化,以满足避碰要求。
关键创新:该论文的关键创新在于将软捕获问题转化为一个凸优化问题,并提出了一种有效的凸松弛方法来处理非凸的视场约束。这种方法能够利用高效的凸优化求解器快速找到最优解,从而提高了算法的计算效率。此外,顺序凸规划的使用进一步提高了轨迹的安全性。
关键设计:视场约束的凸松弛是关键设计之一,通过将非凸的视场约束转化为凸约束,使得整个优化问题成为凸问题。燃料消耗最小化通常作为目标函数,可以使用轨迹长度或推力大小的积分来近似。顺序凸规划的迭代次数和每次迭代的步长是重要的参数,需要根据具体问题进行调整。
🖼️ 关键图片

📊 实验亮点
该算法在仿真中表现出良好的性能和鲁棒性,能够在高达10°/s的物体翻滚速率下成功实现软捕获。通过与传统方法对比,该算法在计算效率和轨迹安全性方面均有显著提升。具体性能数据(例如计算时间、燃料消耗)未在摘要中明确给出,但强调了其快速性和实用性。
🎯 应用场景
该研究成果可应用于空间碎片清除、在轨服务、小行星探测等领域。通过精确控制航天器,实现对非合作目标的稳定捕获,降低空间操作的风险和成本。未来,该技术有望推动深空探测任务的开展,并为空间资源利用提供技术支持。
📄 摘要(原文)
We present a fast trajectory optimization algorithm for the soft capture of uncooperative tumbling space objects. Our algorithm generates safe, dynamically feasible, and minimum-fuel trajectories for a six-degree-of-freedom servicing spacecraft to achieve soft capture (near-zero relative velocity at contact) between predefined locations on the servicer spacecraft and target body. We solve a convex problem by enforcing a convex relaxation of the field-of-view constraint, followed by a sequential convex program correcting the trajectory for collision avoidance. The optimization problems can be solved with a standard second-order cone programming solver, making the algorithm both fast and practical for implementation in flight software. We demonstrate the performance and robustness of our algorithm in simulation over a range of object tumble rates up to 10°/s.