ADM: Accelerated Diffusion Model via Estimated Priors for Robust Motion Prediction under Uncertainties
作者: Jiahui Li, Tianle Shen, Zekai Gu, Jiawei Sun, Chengran Yuan, Yuhang Han, Shuo Sun, Marcelo H. Ang
分类: cs.RO, cs.CV
发布日期: 2024-05-01
备注: 7 pages, 4 figures
💡 一句话要点
ADM:通过估计先验加速扩散模型,提升不确定性下运动预测的鲁棒性
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 运动预测 扩散模型 自动驾驶 先验估计 加速推理
📋 核心要点
- 扩散模型在运动预测中表现出色,但计算成本高昂且对噪声敏感,限制了其在实时场景中的应用。
- 该论文提出了一种加速扩散模型框架,通过学习轨迹的粗粒度先验分布来减少去噪步骤,从而提高效率。
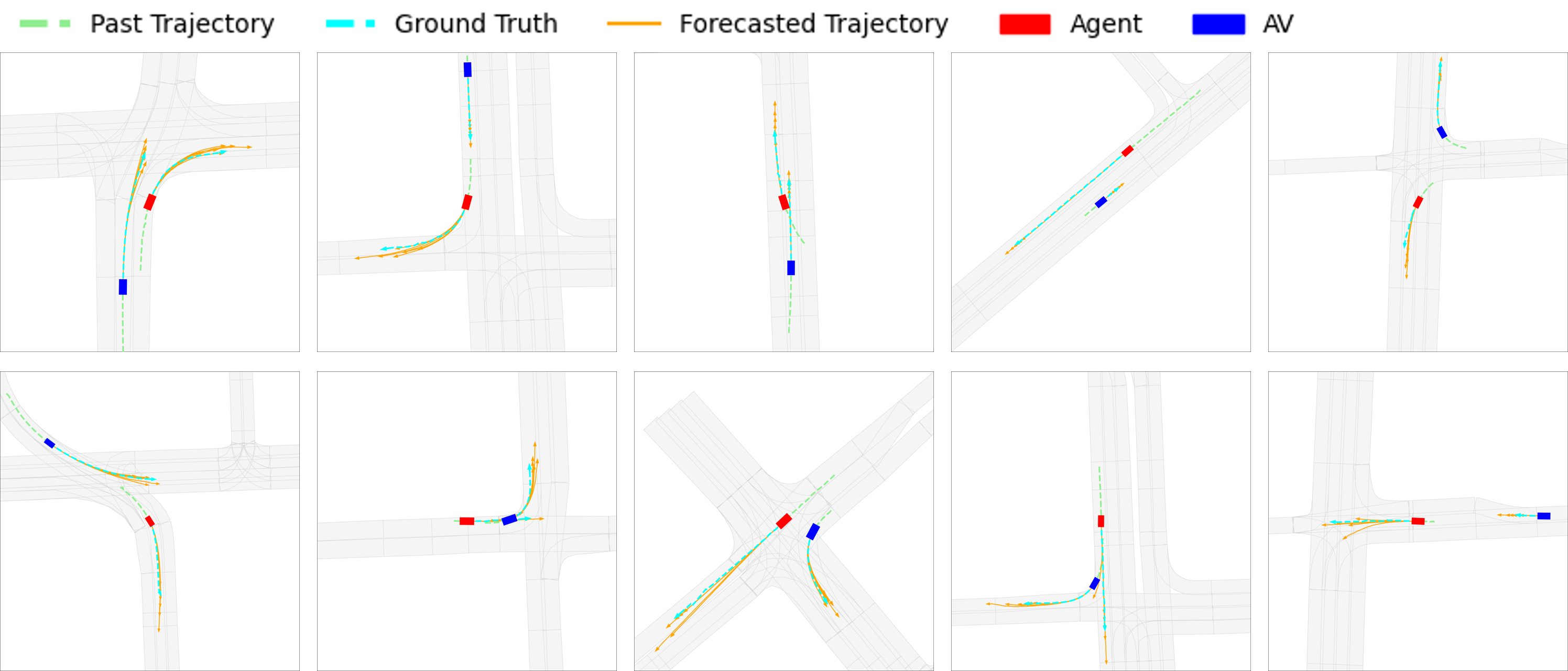
- 实验结果表明,该方法显著加速了推理过程,并在多智能体运动预测任务中取得了性能提升,尤其是在Argoverse 1数据集上。
📝 摘要(中文)
本文提出了一种基于扩散模型的可加速框架,用于预测智能体未来的运动轨迹,并增强了模型对噪声的抵抗能力。该模型的核心思想是学习轨迹的粗粒度先验分布,从而跳过大量的去噪步骤。这一改进不仅提高了采样效率,还保持了预测精度的保真度。该方法满足了自动驾驶车辆所需的严格实时运行标准,能够快速生成轨迹,这对于安全高效的导航至关重要。通过大量实验,该方法将推理时间加速到136毫秒,并且在Argoverse 1运动预测数据集上的多智能体运动预测方面取得了显著的改进。
🔬 方法详解
问题定义:自动驾驶中的运动预测需要理解随机动态和真实世界智能体交互的多模态特性。现有的扩散模型虽然有效,但计算量大,推理速度慢,难以满足自动驾驶的实时性要求,并且对噪声较为敏感,影响预测的准确性。
核心思路:该论文的核心思路是通过学习轨迹的粗粒度先验分布来指导扩散模型的采样过程。通过先验信息,模型可以跳过一些不必要的去噪步骤,从而加速采样过程,同时保持预测的准确性。这种方法相当于在扩散过程中引入了一个“捷径”,使得模型能够更快地收敛到合理的轨迹分布。
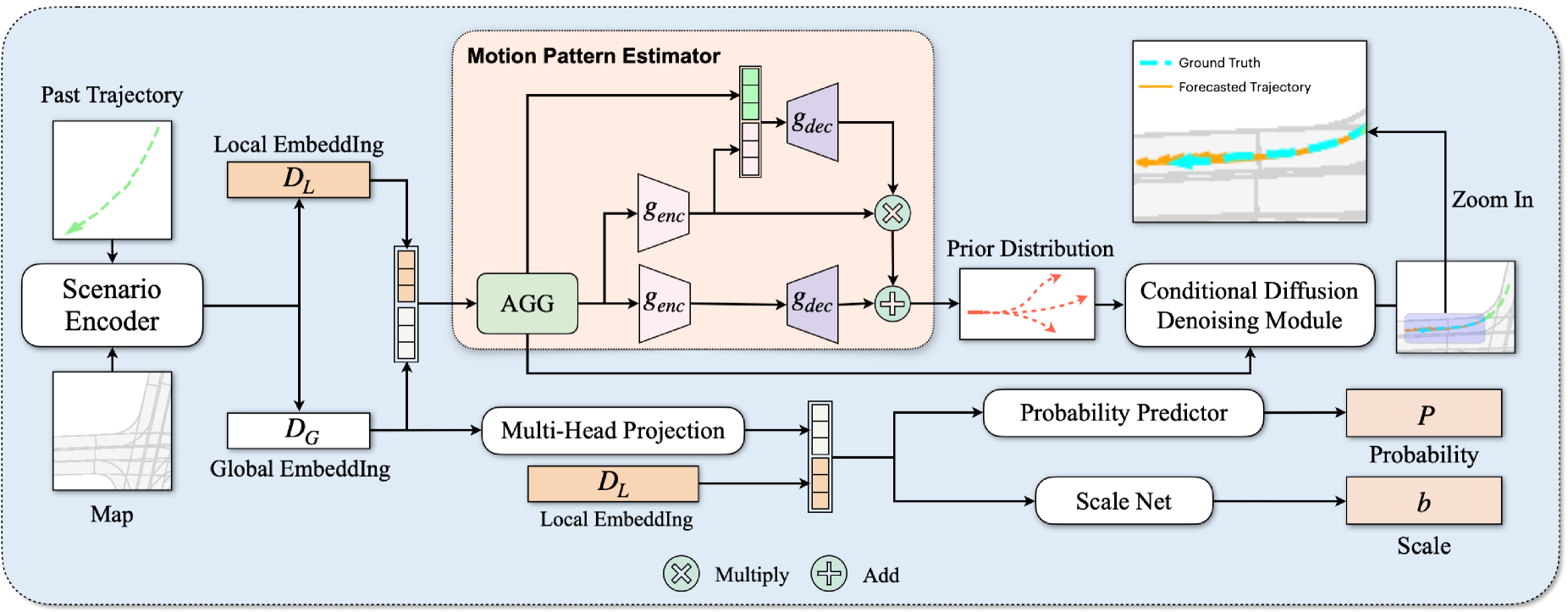
技术框架:该框架主要包含两个阶段:先验估计阶段和加速扩散阶段。在先验估计阶段,模型学习轨迹的粗粒度先验分布。在加速扩散阶段,模型利用学习到的先验信息,指导扩散模型的采样过程,减少去噪步骤,从而加速推理。整体流程是,首先输入场景信息,然后通过先验估计模块得到轨迹的先验分布,最后利用该先验分布加速扩散模型的采样过程,得到最终的预测轨迹。
关键创新:该论文的关键创新在于将先验知识融入到扩散模型的采样过程中,通过学习轨迹的粗粒度先验分布来指导采样,从而减少了去噪步骤,加速了推理过程。与传统的扩散模型相比,该方法能够在保证预测精度的前提下,显著提高推理速度,更适合实时性要求高的场景。
关键设计:论文中关于先验分布的具体建模方式(例如,使用VAE或GAN等生成模型来学习先验分布),以及如何将先验信息融入到扩散模型的采样过程中(例如,通过调整噪声schedule或引入额外的约束项),是关键的技术细节。此外,损失函数的设计也至关重要,需要平衡预测精度和采样效率。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该方法在Argoverse 1运动预测数据集上取得了显著的性能提升,并且将推理时间加速到136毫秒,相比标准扩散模型有显著提升。这表明该方法在保证预测精度的前提下,能够满足自动驾驶等实时性要求高的场景的需求。
🎯 应用场景
该研究成果可广泛应用于自动驾驶、机器人导航、智能交通等领域。通过提高运动预测的效率和鲁棒性,可以提升自动驾驶系统的安全性和可靠性,减少交通事故的发生。此外,该方法还可以应用于人机交互、游戏AI等领域,提升智能体的行为预测能力,从而实现更自然、更智能的交互体验。
📄 摘要(原文)
Motion prediction is a challenging problem in autonomous driving as it demands the system to comprehend stochastic dynamics and the multi-modal nature of real-world agent interactions. Diffusion models have recently risen to prominence, and have proven particularly effective in pedestrian motion prediction tasks. However, the significant time consumption and sensitivity to noise have limited the real-time predictive capability of diffusion models. In response to these impediments, we propose a novel diffusion-based, acceleratable framework that adeptly predicts future trajectories of agents with enhanced resistance to noise. The core idea of our model is to learn a coarse-grained prior distribution of trajectory, which can skip a large number of denoise steps. This advancement not only boosts sampling efficiency but also maintains the fidelity of prediction accuracy. Our method meets the rigorous real-time operational standards essential for autonomous vehicles, enabling prompt trajectory generation that is vital for secure and efficient navigation. Through extensive experiments, our method speeds up the inference time to 136ms compared to standard diffusion model, and achieves significant improvement in multi-agent motion prediction on the Argoverse 1 motion forecasting dataset.