Benchmarking Population-Based Reinforcement Learning across Robotic Tasks with GPU-Accelerated Simulation
作者: Asad Ali Shahid, Yashraj Narang, Vincenzo Petrone, Enrico Ferrentino, Ankur Handa, Dieter Fox, Marco Pavone, Loris Roveda
分类: cs.RO
发布日期: 2024-04-04 (更新: 2025-11-18)
备注: Accepted for publication at 2025 IEEE 21st International Conference on Automation Science and Engineering
期刊: 2025 IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, 2025, pp. 1231-1238
DOI: 10.1109/CASE58245.2025.11163870
💡 一句话要点
提出基于种群的强化学习以解决机器人任务中的训练效率问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 机器人控制 种群进化 GPU加速 超参数优化 Isaac Gym 真实环境应用
📋 核心要点
- 现有深度强化学习方法在训练效率和超参数选择上存在显著挑战,导致需要大量实验。
- 论文提出基于种群的强化学习(PBRL)方法,通过并行训练多个策略来提高探索能力。
- 实验结果表明,PBRL代理在累积奖励上优于传统RL算法,并成功在真实环境中应用。
📝 摘要(中文)
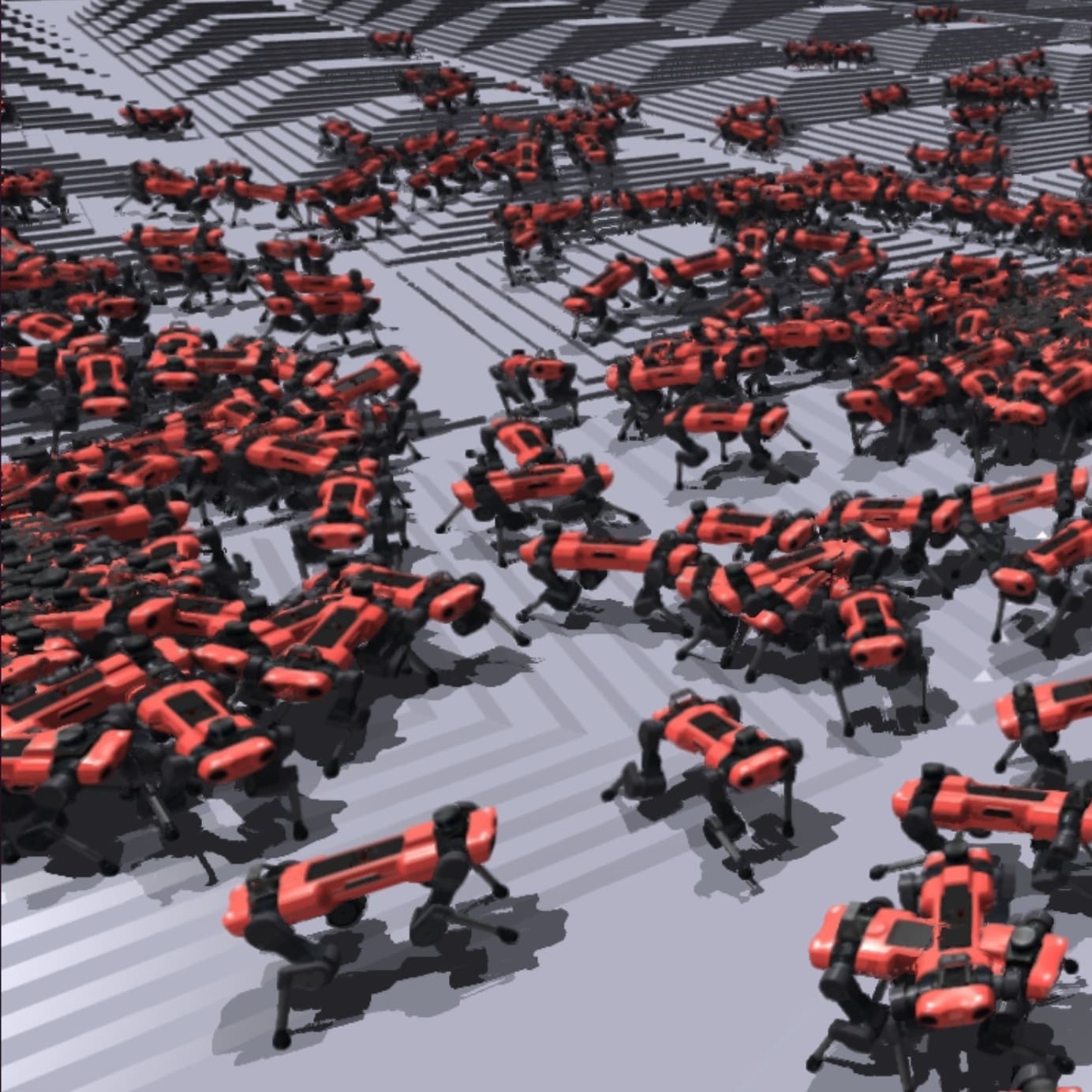
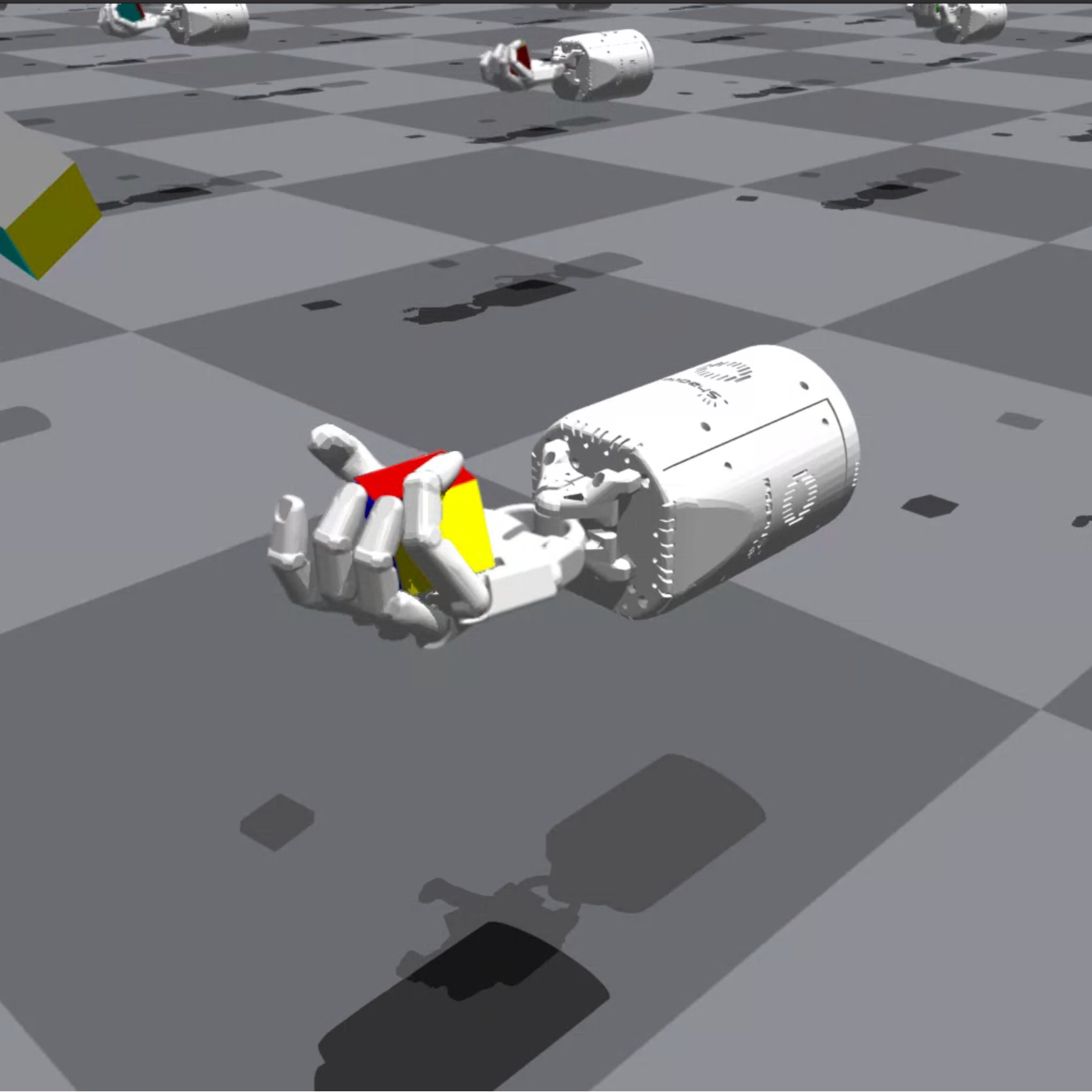
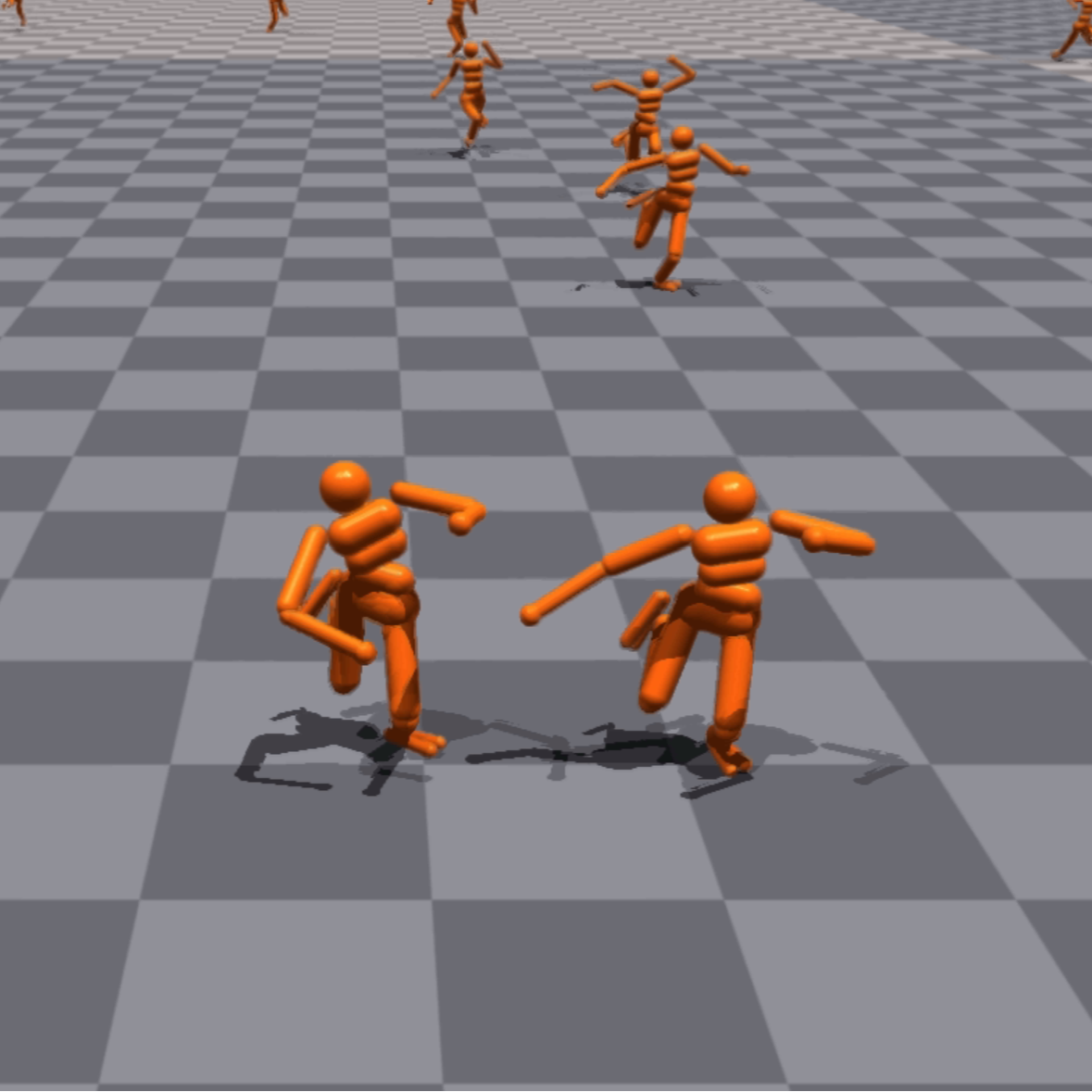
近年来,深度强化学习在解决复杂连续控制任务中表现出色,但训练所需的经验量巨大,且学习效率和策略性能对超参数选择敏感,常需进行大量耗时实验。本文利用基于种群的强化学习(PBRL)方法和GPU加速的物理模拟器,通过并行训练多个策略来增强RL的探索能力。PBRL框架与三种最先进的RL算法(PPO、SAC和DDPG)进行基准测试,动态调整超参数。实验在Isaac Gym的四个挑战性任务上进行,结果显示PBRL代理在累积奖励方面优于非进化基线代理。此外,训练后的代理还成功部署于真实世界的Franka Nut Pick任务中,这是首次将PBRL代理应用于真实硬件。代码和学习策略的视频可在项目网站上获取。
🔬 方法详解
问题定义:本文旨在解决深度强化学习在复杂机器人任务中训练效率低下的问题,现有方法对超参数选择敏感,导致需要大量实验以获得最佳性能。
核心思路:论文提出的基于种群的强化学习(PBRL)方法,通过并行训练多个策略,利用种群进化的思想来动态调整超参数,从而提高学习效率和策略性能。
技术框架:整体架构包括一个GPU加速的物理模拟器和PBRL框架,主要模块包括策略生成、评估和超参数调整。通过并行训练,多个策略在同一环境中进行探索和学习。
关键创新:最重要的创新在于将种群进化与深度强化学习结合,动态调整超参数以适应不同策略的表现,这与传统单一策略训练方法形成鲜明对比。
关键设计:在实验中,设置了不同的种群规模和超参数变异机制,使用累积奖励作为主要性能指标,确保训练过程的高效性和有效性。具体的网络结构和损失函数设计未在摘要中详细说明,需参考原文获取更多细节。
🖼️ 关键图片
📊 实验亮点
实验结果显示,PBRL代理在四个挑战性任务中表现优异,累积奖励显著高于PPO、SAC和DDPG等非进化基线代理,验证了其在强化学习中的有效性和优势。此外,成功将训练后的代理部署于真实环境,标志着PBRL方法的实用性。
🎯 应用场景
该研究的潜在应用领域包括机器人控制、自动化生产和智能系统等。通过提高强化学习的训练效率,能够加速机器人在复杂环境中的学习和适应能力,推动智能机器人技术的实际应用和发展。
📄 摘要(原文)
In recent years, deep reinforcement learning (RL) has shown its effectiveness in solving complex continuous control tasks. However, this comes at the cost of an enormous amount of experience required for training, exacerbated by the sensitivity of learning efficiency and the policy performance to hyperparameter selection, which often requires numerous trials of time-consuming experiments. This work leverages a Population-Based Reinforcement Learning (PBRL) approach and a GPU-accelerated physics simulator to enhance the exploration capabilities of RL by concurrently training multiple policies in parallel. The PBRL framework is benchmarked against three state-of-the-art RL algorithms -- PPO, SAC, and DDPG -- dynamically adjusting hyperparameters based on the performance of learning agents. The experiments are performed on four challenging tasks in Isaac Gym -- Anymal Terrain, Shadow Hand, Humanoid, Franka Nut Pick -- by analyzing the effect of population size and mutation mechanisms for hyperparameters. The results show that PBRL agents achieve superior performance, in terms of cumulative reward, compared to non-evolutionary baseline agents. Moreover, the trained agents are finally deployed in the real world for a Franka Nut Pick task. To our knowledge, this is the first sim-to-real attempt for deploying PBRL agents on real hardware. Code and videos of the learned policies are available on our project website (https://sites.google.com/view/pbrl).