ContactHandover: Contact-Guided Robot-to-Human Object Handover
作者: Zixi Wang, Zeyi Liu, Nicolas Ouporov, Shuran Song
分类: cs.RO, cs.AI, cs.CV
发布日期: 2024-04-01 (更新: 2024-09-30)
备注: Accepted to IROS 2024. Project website: https://clairezixiwang.github.io/ContactHandover.github.io/
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出ContactHandover以解决机器人与人类物品交接问题
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 机器人交接 人机协作 接触引导 物品交付 抓握策略 3D可接触性图 家居物品 优化算法
📋 核心要点
- 现有的机器人物品交接方法往往忽视了人类接触点的可达性,导致交接过程不够自然。
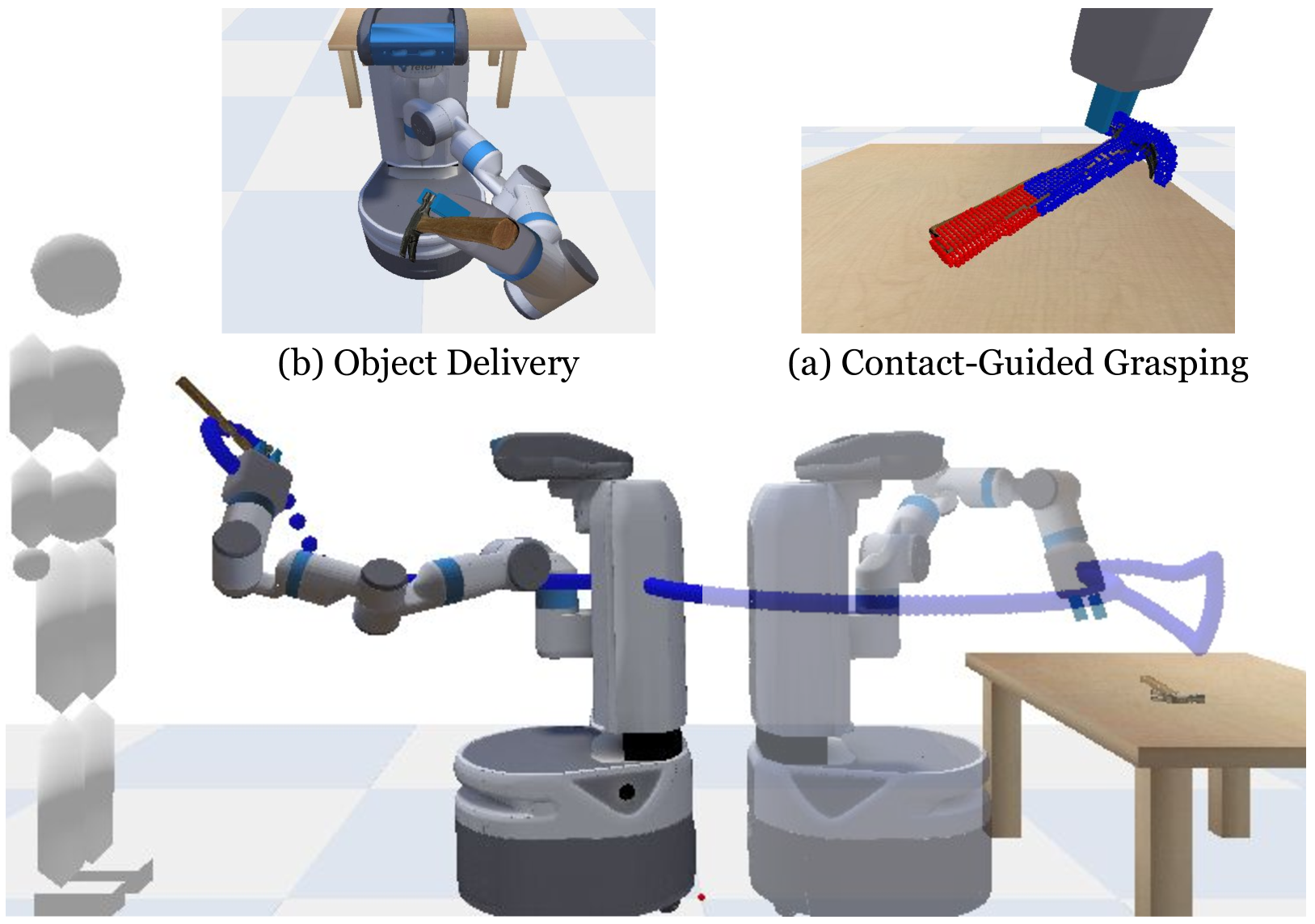
- 本文提出的ContactHandover系统通过接触引导的抓握和物品交付阶段,优化了机器人与人类的交接过程。
- 实验结果表明,ContactHandover在27种家居物品上实现了更好的可视性和人类接触点的可达性,优于多个基线方法。
📝 摘要(中文)
机器人与人类的物品交接是许多人机协作任务中的重要环节。成功的交接要求机器人在保持稳定抓握的同时,确保人类以自然、易用的方式接收物品。本文提出了ContactHandover,一个包含接触引导抓握阶段和物品交付阶段的机器人到人类交接系统。在抓握阶段,ContactHandover预测机器人抓握姿态和人类接触点的3D可接触性图。通过惩罚阻碍人类接触点的抓握姿态,重新排序机器人抓握姿态,并执行排名最高的抓握。在交付阶段,机器人末端执行器的姿态通过最大化接近人类的接触点,同时最小化人类手臂关节扭矩和位移来计算。我们在27种多样的家居物品上评估了该系统,结果显示与多个基线相比,我们的系统在可视性和人类接触点的可达性上表现更佳。
🔬 方法详解
问题定义:本文旨在解决机器人与人类物品交接过程中,如何确保人类能够自然、轻松地接收物品的问题。现有方法往往未能充分考虑人类的接触点,导致交接不够顺畅。
核心思路:ContactHandover的核心思路是通过预测人类接触点和优化机器人抓握姿态,来提升交接的自然性和有效性。通过引入接触引导的概念,确保机器人在交接过程中不会阻碍人类的接触。
技术框架:该系统分为两个主要阶段:接触引导抓握阶段和物品交付阶段。在抓握阶段,系统预测6自由度的机器人抓握姿态和3D人类接触点的可接触性图;在交付阶段,计算机器人末端执行器的姿态,以最大化人类接触点的可达性。
关键创新:最重要的创新在于引入了接触引导的抓握策略,通过对抓握姿态的重新排序,避免了阻碍人类接触点的情况。这一设计显著提升了交接的自然性。
关键设计:在抓握阶段,系统使用了惩罚机制来重新排序抓握姿态,确保选择的姿态不会阻碍人类接触点。同时,在交付阶段,优化了机器人末端执行器的姿态,以最小化人类手臂的关节扭矩和位移。整体设计注重人机交互的自然性和有效性。
🖼️ 关键图片


📊 实验亮点
实验结果显示,ContactHandover在27种不同的家居物品上,相较于多个基线方法,显著提高了人类接触点的可视性和可达性,具体提升幅度未知。这表明该系统在实际应用中具有更好的交接效果。
🎯 应用场景
该研究的潜在应用领域包括家庭服务机器人、医疗辅助机器人以及人机协作工业机器人等。通过提升机器人与人类的交接能力,能够显著改善人机协作的效率和用户体验,具有重要的实际价值和未来影响。
📄 摘要(原文)
Robot-to-human object handover is an important step in many human robot collaboration tasks. A successful handover requires the robot to maintain a stable grasp on the object while making sure the human receives the object in a natural and easy-to-use manner. We propose ContactHandover, a robot to human handover system that consists of two phases: a contact-guided grasping phase and an object delivery phase. During the grasping phase, ContactHandover predicts both 6-DoF robot grasp poses and a 3D affordance map of human contact points on the object. The robot grasp poses are re-ranked by penalizing those that block human contact points, and the robot executes the highest ranking grasp. During the delivery phase, the robot end effector pose is computed by maximizing human contact points close to the human while minimizing the human arm joint torques and displacements. We evaluate our system on 27 diverse household objects and show that our system achieves better visibility and reachability of human contacts to the receiver compared to several baselines. More results can be found on https://clairezixiwang.github.io/ContactHandover.github.io