Stable Deep Reinforcement Learning via Isotropic Gaussian Representations
作者: Ali Saheb, Johan Obando-Ceron, Aaron Courville, Pouya Bashivan, Pablo Samuel Castro
分类: cs.LG, cs.AI
发布日期: 2026-02-22
💡 一句话要点
提出基于各向同性高斯表示的稳定深度强化学习方法,提升非平稳环境下的性能。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 深度强化学习 非平稳环境 各向同性高斯 表示学习 正则化
📋 核心要点
- 深度强化学习在非平稳环境下训练不稳定,目标和数据分布随时间变化,导致性能下降。
- 论文提出草图各向同性高斯正则化方法,鼓励表示向各向同性高斯分布靠拢,提升适应性和稳定性。
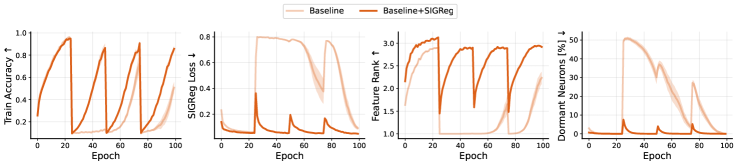
- 实验表明,该方法能有效提升非平稳环境下的性能,并减少表示崩溃、神经元休眠等问题。
📝 摘要(中文)
深度强化学习系统常常由于非平稳性而遭受不稳定的训练动态,其中学习目标和数据分布随时间演变。本文证明了在非平稳目标下,各向同性高斯嵌入具有显著优势。特别地,它们能够为线性读出层提供对时变目标的稳定跟踪,在固定的方差预算下实现最大熵,并鼓励对所有表示维度的均衡使用——所有这些都使得智能体更具适应性和稳定性。基于此,我们提出使用草图各向同性高斯正则化(Sketched Isotropic Gaussian Regularization)来在训练期间将表示塑造为各向同性高斯分布。在各种领域中的实验结果表明,这种简单且计算成本低廉的方法提高了非平稳环境下的性能,同时减少了表示崩溃、神经元休眠和训练不稳定。
🔬 方法详解
问题定义:深度强化学习在非平稳环境中面临训练不稳定的问题。由于目标策略和环境的动态变化,智能体学习到的表示容易崩溃,导致神经元休眠,最终影响性能。现有方法难以有效地应对这种非平稳性,导致训练过程不稳定,泛化能力差。
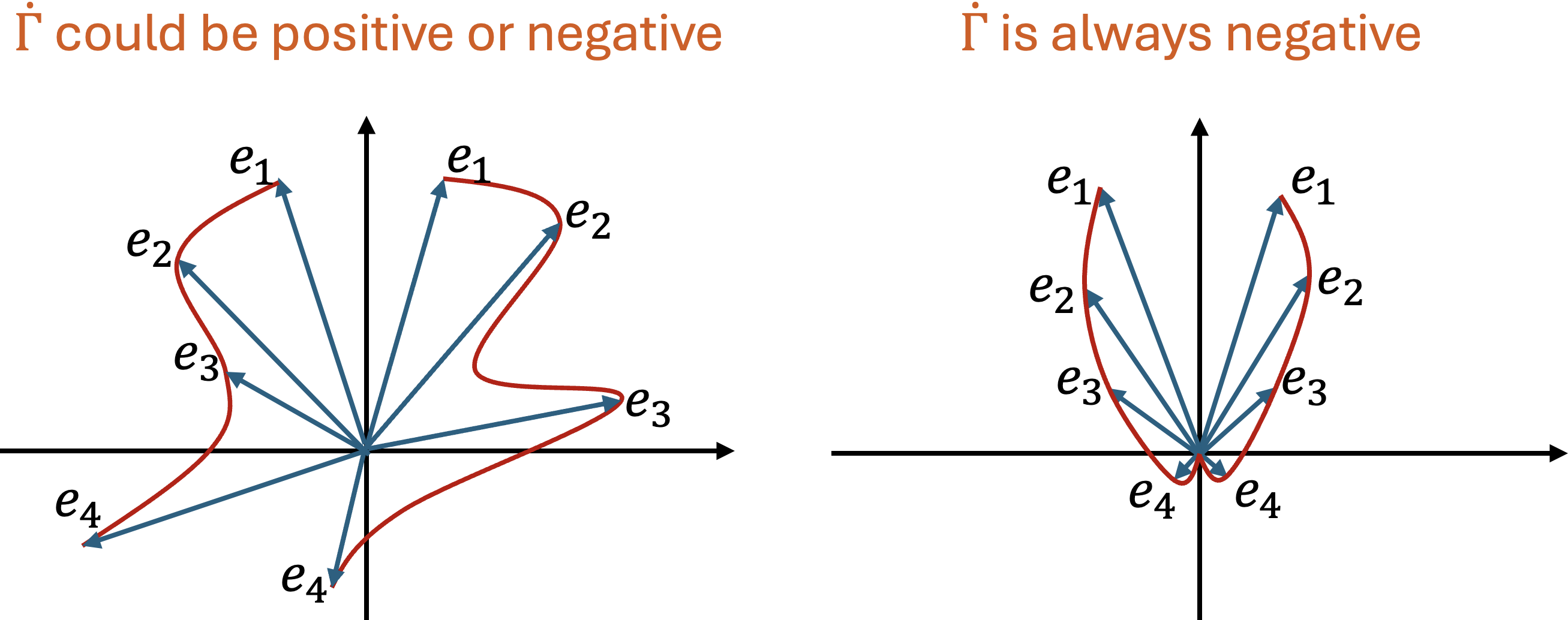
核心思路:论文的核心思路是利用各向同性高斯表示的优良性质来稳定训练过程。各向同性高斯分布具有最大熵,能够鼓励智能体探索所有可能的表示维度,避免表示崩溃。此外,论文证明了各向同性高斯嵌入能够为线性读出层提供对时变目标的稳定跟踪,从而提高智能体的适应性。
技术框架:论文提出的方法主要是在现有的深度强化学习框架中加入一个正则化项。具体来说,在训练过程中,通过Sketched Isotropic Gaussian Regularization (SIGR) 鼓励学习到的表示向各向同性高斯分布靠拢。SIGR通过计算表示与各向同性高斯分布之间的距离(例如,KL散度),并将其作为正则化项加入到损失函数中。整体流程包括:1)智能体与环境交互,收集经验数据;2)利用经验数据更新策略网络和价值网络;3)计算表示的SIGR损失,并将其加入到总损失中;4)重复以上步骤,直到训练收敛。
关键创新:论文的关键创新在于将各向同性高斯表示引入到深度强化学习中,并提出了相应的正则化方法。与现有方法相比,该方法能够更有效地应对非平稳环境,提高训练的稳定性和泛化能力。此外,SIGR方法计算成本低廉,易于集成到现有的深度强化学习框架中。
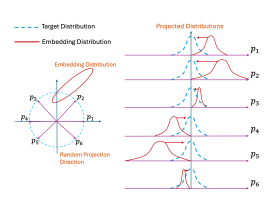
关键设计:SIGR的关键设计在于如何有效地计算表示与各向同性高斯分布之间的距离。论文采用草图(sketching)技术来降低计算复杂度。具体来说,首先随机采样一些向量,然后计算表示在这些向量上的投影,最后利用这些投影来估计表示与各向同性高斯分布之间的KL散度。此外,论文还对正则化系数进行了调整,以平衡表示的探索和利用。
🖼️ 关键图片
📊 实验亮点
实验结果表明,提出的SIGR方法在多个强化学习任务中都取得了显著的性能提升,尤其是在非平稳环境中。例如,在某些任务中,智能体的平均奖励提高了10%以上,并且训练过程更加稳定,减少了表示崩溃和神经元休眠的现象。
🎯 应用场景
该研究成果可应用于各种需要在非平稳环境中进行决策的场景,例如机器人导航、自动驾驶、金融交易等。通过提高智能体的适应性和稳定性,可以使其在动态变化的环境中更好地完成任务,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Deep reinforcement learning systems often suffer from unstable training dynamics due to non-stationarity, where learning objectives and data distributions evolve over time. We show that under non-stationary targets, isotropic Gaussian embeddings are provably advantageous. In particular, they induce stable tracking of time-varying targets for linear readouts, achieve maximal entropy under a fixed variance budget, and encourage a balanced use of all representational dimensions--all of which enable agents to be more adaptive and stable. Building on this insight, we propose the use of Sketched Isotropic Gaussian Regularization for shaping representations toward an isotropic Gaussian distribution during training. We demonstrate empirically, over a variety of domains, that this simple and computationally inexpensive method improves performance under non-stationarity while reducing representation collapse, neuron dormancy, and training instability.