An Interpretable Data-Driven Model of the Flight Dynamics of Hawks
作者: Lydia France, Karl Lapo, J. Nathan Kutz
分类: q-bio.QM, cs.CE, cs.LG, physics.flu-dyn
发布日期: 2026-02-22
备注: 16 pages, 4 figures
💡 一句话要点
提出基于动态模态分解的鹰类飞行动力学可解释数据驱动模型
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 飞行动力学 动态模态分解 数据驱动建模 鸟类飞行 运动捕捉
📋 核心要点
- 现有飞行动力学模型难以捕捉真实鸟类飞行的复杂性,缺乏可解释性,且难以用真实数据验证。
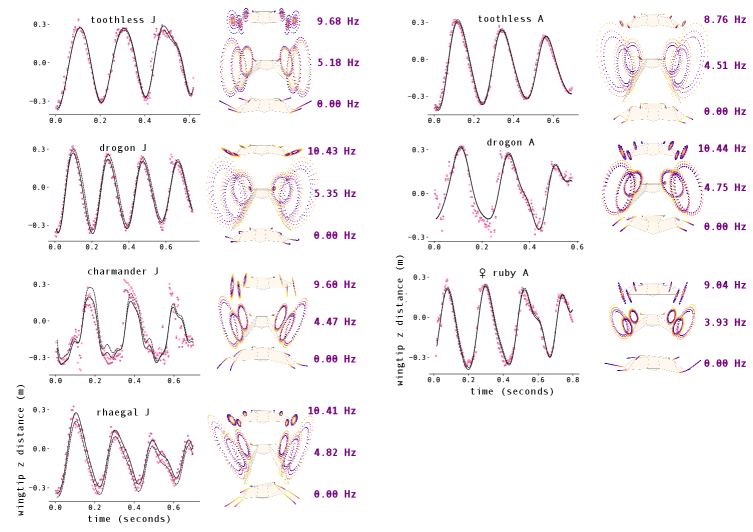
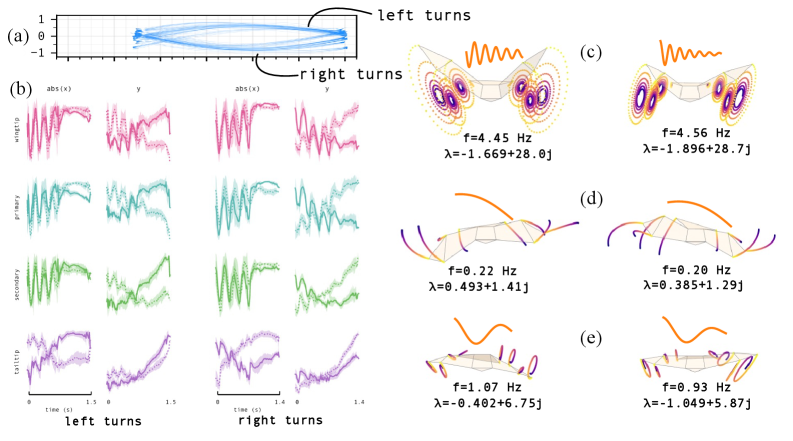
- 利用动态模态分解(DMD)从鹰的运动捕捉数据中提取可解释的模态结构,线性组合重构飞行。
- DMD模型仅用少量参数即可准确重构飞行,揭示了飞行中主导模态间的参数耦合,暗示了运动效率。
📝 摘要(中文)
尽管鸟类飞行分析已取得显著进展,但目前尚不存在用于飞行动力学的生成物理模型。理解各种飞行动作背后的机制对于了解如何实现敏捷飞行至关重要。即使在简单的飞行中,也存在多个目标,这使得对整体飞行机制的分析变得复杂。本文利用动态模态分解(DMD)这一数据驱动方法,对鹰的运动捕捉记录进行分析,结果表明,诸如拍打、转弯、着陆和滑翔等多种行为状态可以通过简单且可解释的模态结构(即潜在的翼-尾形状)进行建模,这些模态结构可以线性组合以重现实验飞行观测结果。此外,DMD模型可用于推断自然的拍打动作。飞行具有高度个体性,不同鹰的风格各异,但我们发现它们共享一组共同的动态模态。与传统的基于物理原理构建的模型不同,DMD模型直接拟合数据,而传统模型很少能在真实数据上进行测试,并且其假设通常在真实飞行中无效。DMD方法能够高度准确地重建飞行动力学,仅需三个参数即可表征拍打动作,第四个参数用于整合转弯动作。DMD分析进一步表明,飞行的潜在机制,与最简单的步行模型非常相似,显示了主导模态之间的参数耦合,暗示了运动的效率。
🔬 方法详解
问题定义:现有基于物理原理的鸟类飞行动力学模型,其假设在真实飞行场景中往往不成立,难以准确描述和预测鸟类的飞行行为。此外,这些模型通常缺乏可解释性,难以揭示飞行动作背后的关键机制。因此,需要一种能够从真实飞行数据中学习,并提供可解释结果的飞行动力学建模方法。
核心思路:本文的核心思路是利用动态模态分解(DMD)这一数据驱动的方法,从鹰的运动捕捉数据中提取出描述不同飞行状态(如拍打、转弯、滑翔等)的模态结构。这些模态结构可以被视为飞行动作的基本组成单元,通过线性组合,可以重构出复杂的飞行轨迹。DMD方法能够直接从数据中学习,避免了对底层物理机制的过度简化,从而更准确地捕捉真实飞行的复杂性。
技术框架:该方法主要包含以下几个步骤:1) 使用运动捕捉系统记录鹰的飞行轨迹数据。2) 对采集到的数据进行预处理,例如去除噪声、进行坐标变换等。3) 使用DMD算法对预处理后的数据进行分解,提取出描述不同飞行状态的模态结构和对应的动态特性。4) 通过线性组合这些模态结构,重构出原始的飞行轨迹。5) 分析提取出的模态结构,揭示飞行动作背后的关键机制。
关键创新:该方法最重要的创新点在于将DMD方法应用于鸟类飞行动力学建模。与传统的基于物理原理的模型相比,DMD模型直接从数据中学习,避免了对底层物理机制的过度简化,能够更准确地捕捉真实飞行的复杂性。此外,DMD方法提取出的模态结构具有良好的可解释性,能够帮助研究人员理解飞行动作背后的关键机制。
关键设计:DMD算法本身是一种无监督学习方法,不需要预先定义损失函数或网络结构。关键在于如何选择合适的DMD参数,例如模态的数量、时间窗口的大小等,以获得最佳的重构效果和可解释性。此外,数据预处理的质量也对DMD的性能有重要影响。论文中提到仅需三个参数即可表征拍打动作,第四个参数用于整合转弯动作,具体参数设置细节未知。
🖼️ 关键图片
📊 实验亮点
研究表明,仅需少量参数(三个参数表征拍打,一个参数整合转弯)即可高度准确地重构鹰的飞行动力学。DMD分析揭示了飞行中主导模态之间的参数耦合,暗示了运动的效率。虽然不同鹰的飞行风格存在差异,但它们共享一组共同的动态模态,表明存在通用的飞行机制。
🎯 应用场景
该研究成果可应用于无人机设计与控制,通过模仿鹰类高效的飞行策略,提升无人机的敏捷性和能源效率。此外,该模型还可用于生物力学研究,深入理解鸟类飞行的生物学机制,并为其他飞行生物的研究提供借鉴。未来,该方法或可扩展到其他动物的运动建模与分析。
📄 摘要(原文)
Despite significant analysis of bird flight, generative physics models for flight dynamics do not currently exist. Yet the underlying mechanisms responsible for various flight manoeuvres are important for understanding how agile flight can be accomplished. Even in a simple flight, multiple objectives are at play, complicating analysis of the overall flight mechanism. Using the data-driven method of dynamic mode decomposition (DMD) on motion capture recordings of hawks, we show that multiple behavioral states such as flapping, turning, landing, and gliding, can be modeled by simple and interpretable modal structures (i.e. the underlying wing-tail shape) which can be linearly combined to reproduce the experimental flight observations. Moreover, the DMD model can be used to extrapolate naturalistic flapping. Flight is highly individual, with differences in style across the hawks, but we find they share a common set of dynamic modes. The DMD model is a direct fit to data, unlike traditional models constructed from physics principles which can rarely be tested on real data and whose assumptions are typically invalid in real flight. The DMD approach gives a highly accurate reconstruction of the flight dynamics with only three parameters needed to characterize flapping, and a fourth to integrate turning manoeuvres. The DMD analysis further shows that the underlying mechanism of flight, much like simplest walking models, displays a parametric coupling between dominant modes suggesting efficiency for locomotion.