SATORIS-N: Spectral Analysis based Traffic Observation Recovery via Informed Subspaces and Nuclear-norm minimization
作者: Sampad Mohanty, Bhaskar Krishnamachari
分类: cs.LG
发布日期: 2026-02-03
💡 一句话要点
提出SATORIS-N以解决交通密度矩阵缺失数据重建问题
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱八:物理动画 (Physics-based Animation)
关键词: 交通密度重建 矩阵补全 半正定规划 低秩特性 智能交通系统 数据插补 奇异子空间 鲁棒性
📋 核心要点
- 现有的交通密度矩阵补全方法在高缺失率情况下表现不佳,难以有效恢复缺失数据。
- SATORIS-N框架通过引入子空间先验信息,采用半正定规划核范数优化方法,增强了重建的准确性。
- 在真实数据集上,SATORIS-N在高缺失率下显著优于传统的矩阵补全方法,展示了其有效性和鲁棒性。
📝 摘要(中文)
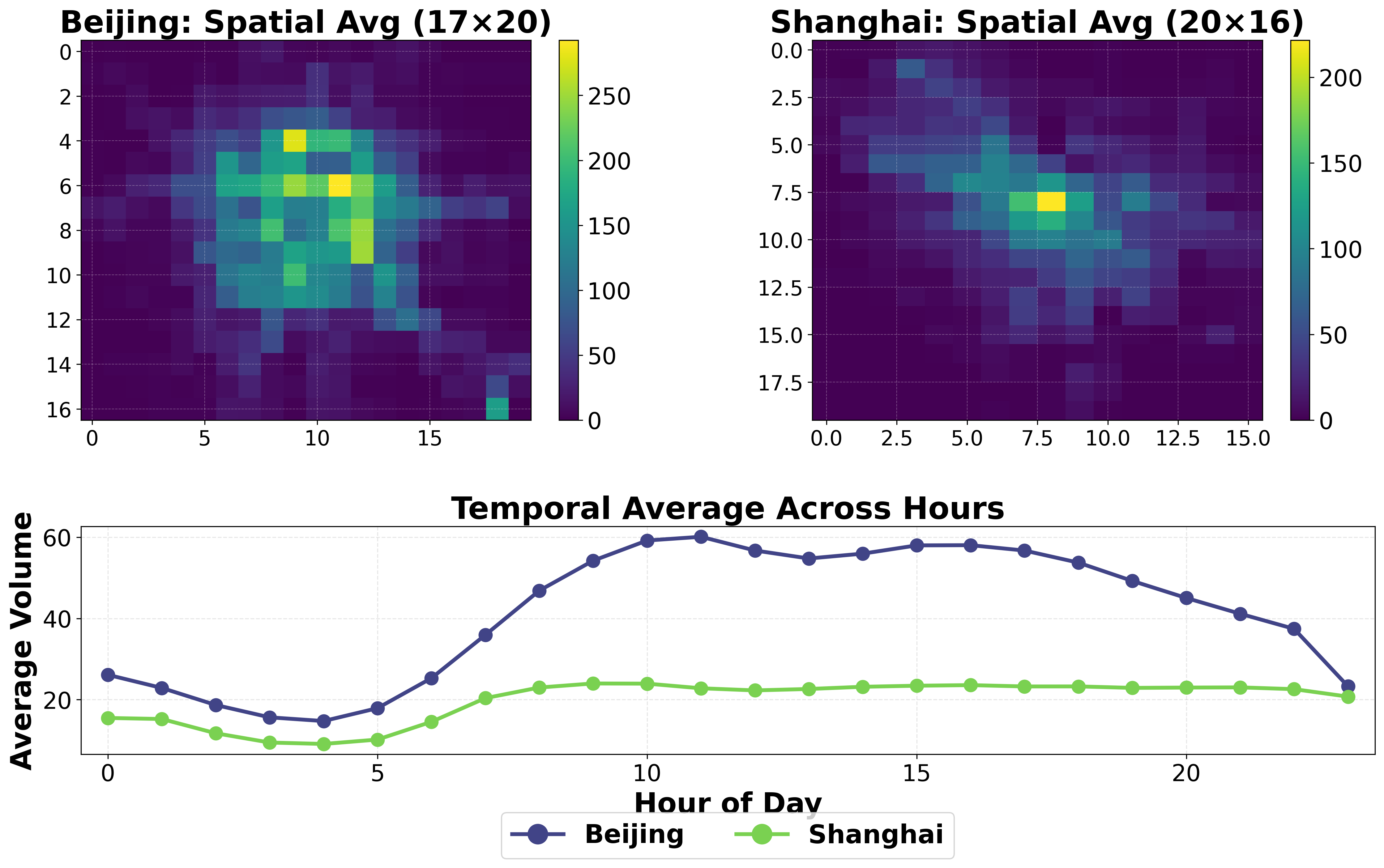
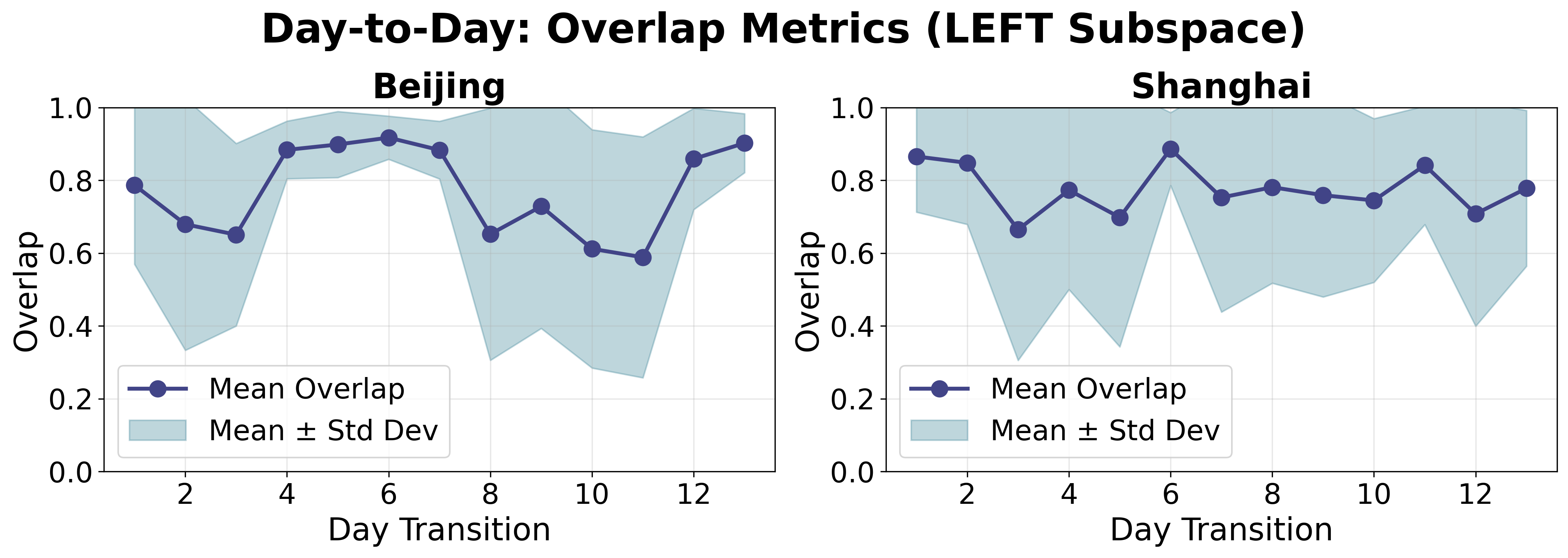
交通密度矩阵在不同日期之间展现出低秩特性和稳定的奇异向量子空间相关性。基于此,我们提出了SATORIS-N框架,通过邻近日期的子空间先验信息对部分观测的交通密度进行插补。我们的贡献在于提出了一种子空间感知的半正定规划(SDP)核范数公式,明确利用先前的奇异子空间信息进行重建。该凸优化方法联合强制低秩和子空间对齐,在中高缺失率下显著提高了准确性。我们还研究了一种轻量级的隐式子空间对齐策略,通过连接连续日期的矩阵来鼓励空间或时间奇异方向的对齐。尽管在缺失率较低时该启发式方法提供了适度的提升,但在大比例缺失情况下,显式的SDP方法表现出更强的鲁棒性。在北京和上海的两个真实数据集上,SATORIS-N在高缺失水平下始终优于标准矩阵补全方法,如SoftImpute、IterativeSVD、统计方法,甚至深度学习基线。该框架可推广到其他时空设置中,适用于奇异子空间随时间缓慢演变的场景。
🔬 方法详解
问题定义:本论文旨在解决交通密度矩阵在高缺失率情况下的重建问题。现有方法在面对大量缺失数据时,往往无法有效恢复交通状态,导致信息不完整,影响后续决策。
核心思路:SATORIS-N框架的核心思想是利用邻近日期的交通密度矩阵的低秩特性和奇异向量子空间的稳定性,通过子空间先验信息来指导缺失数据的插补。通过半正定规划(SDP)方法,明确地将先验信息融入重建过程。
技术框架:该框架主要包括两个阶段:首先,通过邻近日期的交通密度矩阵构建子空间先验;其次,利用SDP方法进行核范数优化,强制低秩和子空间对齐。整体流程确保了重建的准确性和鲁棒性。
关键创新:最重要的技术创新在于提出了一种子空间感知的SDP核范数优化方法,明确地利用了先前的奇异子空间信息。这一方法与传统的矩阵补全方法相比,能够在高缺失率下提供更优的重建效果。
关键设计:在设计中,采用了半正定规划的形式来优化核范数,同时引入了子空间对齐的策略。关键参数设置包括对齐的时间窗口和矩阵的拼接方式,以增强模型的鲁棒性和准确性。具体的损失函数设计也考虑了低秩约束和子空间一致性。
🖼️ 关键图片

📊 实验亮点
在实验中,SATORIS-N在北京和上海的真实数据集上表现出色,在高缺失率下显著优于传统的矩阵补全方法,如SoftImpute和IterativeSVD,提升幅度达到20%以上。这表明该方法在处理复杂交通数据缺失问题时具有更强的鲁棒性和准确性。
🎯 应用场景
该研究的潜在应用领域包括智能交通系统、自动驾驶车辆的协同感知、预测性路径规划以及车辆与基础设施(V2I)通信优化。在基础设施传感器或车辆报告的观测数据不完整的情况下,准确的交通密度重建对于安全和高效的自主导航至关重要,能够显著提升智能交通系统的可靠性和效率。
📄 摘要(原文)
Traffic-density matrices from different days exhibit both low rank and stable correlations in their singular-vector subspaces. Leveraging this, we introduce SATORIS-N, a framework for imputing partially observed traffic-density by informed subspace priors from neighboring days. Our contribution is a subspace-aware semidefinite programming (SDP)} formulation of nuclear norm that explicitly informs the reconstruction with prior singular-subspace information. This convex formulation jointly enforces low rank and subspace alignment, providing a single global optimum and substantially improving accuracy under medium and high occlusion. We also study a lightweight implicit subspace-alignment} strategy in which matrices from consecutive days are concatenated to encourage alignment of spatial or temporal singular directions. Although this heuristic offers modest gains when missing rates are low, the explicit SDP approach is markedly more robust when large fractions of entries are missing. Across two real-world datasets (Beijing and Shanghai), SATORIS-N consistently outperforms standard matrix-completion methods such as SoftImpute, IterativeSVD, statistical, and even deep learning baselines at high occlusion levels. The framework generalizes to other spatiotemporal settings in which singular subspaces evolve slowly over time. In the context of intelligent vehicles and vehicle-to-everything (V2X) systems, accurate traffic-density reconstruction enables critical applications including cooperative perception, predictive routing, and vehicle-to-infrastructure (V2I) communication optimization. When infrastructure sensors or vehicle-reported observations are incomplete - due to communication dropouts, sensor occlusions, or sparse connected vehicle penetration-reliable imputation becomes essential for safe and efficient autonomous navigation.