Solving Inverse Problems with Flow-based Models via Model Predictive Control
作者: George Webber, Alexander Denker, Riccardo Barbano, Andrew J Reader
分类: eess.IV, cs.LG
发布日期: 2026-01-30
💡 一句话要点
提出MPC-Flow,通过模型预测控制解决Flow模型逆问题,实现高效条件生成。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: Flow模型 逆问题 模型预测控制 条件生成 图像恢复
📋 核心要点
- 现有Flow模型在条件生成任务中,直接优化轨迹计算量大,内存需求高,限制了其应用。
- MPC-Flow将逆问题分解为一系列控制子问题,利用模型预测控制在推理时进行引导,降低计算复杂度。
- 实验表明,MPC-Flow在图像恢复任务上表现出色,并能扩展到大型Flow模型,且无需训练。
📝 摘要(中文)
基于Flow的生成模型为逆问题提供了强大的无条件先验,但引导其动态进行条件生成仍然具有挑战性。最近的工作将Flow模型中免训练的条件生成视为一个最优控制问题;然而,解决由此产生的轨迹优化在计算和内存上都非常密集,需要通过Flow动态进行微分或伴随求解。我们提出了MPC-Flow,一个模型预测控制框架,它将基于Flow的生成模型的逆问题求解公式化为一系列控制子问题,从而在推理时实现实用的基于最优控制的引导。我们提供了将MPC-Flow与底层最优控制目标联系起来的理论保证,并展示了不同的算法选择如何产生一系列引导算法,包括避免通过生成模型轨迹进行反向传播的方案。我们在基准图像恢复任务(包括线性和非线性设置,如图像修复、去模糊和超分辨率)上评估了MPC-Flow,并通过在消费级硬件上对FLUX.2 (32B)进行量化设置下的免训练引导,证明了强大的性能和对大规模最先进架构的可扩展性。
🔬 方法详解
问题定义:论文旨在解决使用Flow-based生成模型进行逆问题求解时,条件生成过程计算和内存开销大的问题。现有方法通常需要通过整个Flow模型的轨迹进行反向传播,这对于大型模型来说是不可行的。因此,如何在保证生成质量的前提下,降低计算复杂度是关键挑战。
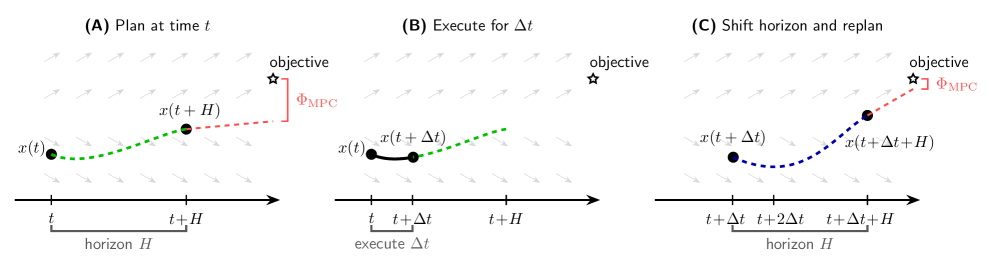
核心思路:论文的核心思路是将逆问题求解转化为一个模型预测控制(MPC)问题。通过将整个生成过程分解为一系列较小的控制子问题,并在每个子问题中进行局部优化,从而避免了对整个轨迹进行反向传播。这种方法降低了计算复杂度和内存需求,使得在消费级硬件上使用大型Flow模型成为可能。
技术框架:MPC-Flow框架主要包含以下几个阶段:1) 将逆问题建模为最优控制问题;2) 将最优控制问题分解为一系列模型预测控制子问题;3) 在每个子问题中,使用优化算法(例如梯度下降)找到最优控制策略;4) 将每个子问题的结果串联起来,得到最终的生成结果。该框架允许选择不同的算法来解决每个控制子问题,从而在计算效率和生成质量之间进行权衡。
关键创新:MPC-Flow的关键创新在于将模型预测控制引入到Flow-based生成模型的逆问题求解中。与传统的直接优化方法相比,MPC-Flow避免了对整个生成模型轨迹进行反向传播,从而显著降低了计算复杂度和内存需求。此外,MPC-Flow还提供了一种灵活的框架,允许选择不同的算法来解决每个控制子问题,从而适应不同的应用场景。
关键设计:MPC-Flow的关键设计包括:1) 如何将逆问题建模为最优控制问题;2) 如何选择合适的控制子问题分解策略;3) 如何选择合适的优化算法来解决每个控制子问题;4) 如何设计合适的奖励函数来引导生成过程。论文中提到可以使用不同的算法选择来产生一系列引导算法,包括避免通过生成模型轨迹进行反向传播的方案。具体参数设置和网络结构取决于所使用的Flow模型和具体的逆问题。
🖼️ 关键图片

📊 实验亮点
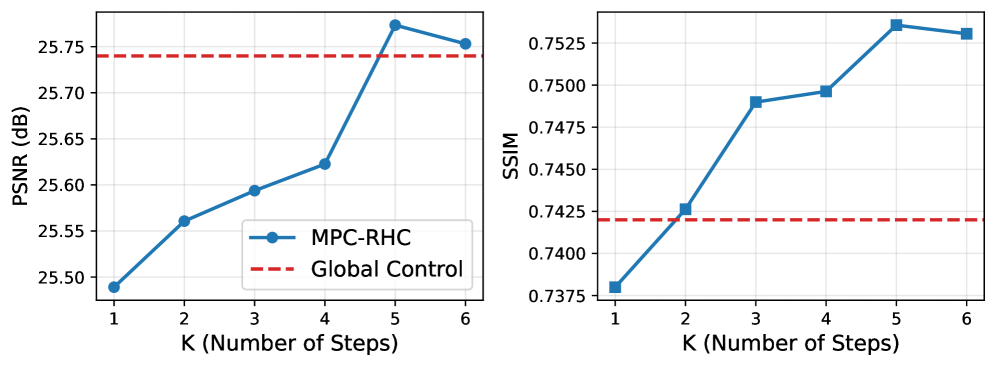
论文在图像修复、去模糊和超分辨率等基准任务上验证了MPC-Flow的有效性。实验结果表明,MPC-Flow能够实现与现有方法相当甚至更好的性能,同时显著降低了计算复杂度和内存需求。特别值得一提的是,MPC-Flow成功地在消费级硬件上对FLUX.2 (32B)进行了免训练引导,展示了其对大规模模型的强大可扩展性。
🎯 应用场景
MPC-Flow在图像恢复领域具有广泛的应用前景,例如图像修复、去模糊、超分辨率等。此外,该方法还可以应用于其他逆问题,例如信号重建、医学图像重建等。通过降低计算复杂度和内存需求,MPC-Flow使得在资源受限的设备上使用大型Flow模型成为可能,从而推动了生成模型在实际应用中的普及。
📄 摘要(原文)
Flow-based generative models provide strong unconditional priors for inverse problems, but guiding their dynamics for conditional generation remains challenging. Recent work casts training-free conditional generation in flow models as an optimal control problem; however, solving the resulting trajectory optimisation is computationally and memory intensive, requiring differentiation through the flow dynamics or adjoint solves. We propose MPC-Flow, a model predictive control framework that formulates inverse problem solving with flow-based generative models as a sequence of control sub-problems, enabling practical optimal control-based guidance at inference time. We provide theoretical guarantees linking MPC-Flow to the underlying optimal control objective and show how different algorithmic choices yield a spectrum of guidance algorithms, including regimes that avoid backpropagation through the generative model trajectory. We evaluate MPC-Flow on benchmark image restoration tasks, spanning linear and non-linear settings such as in-painting, deblurring, and super-resolution, and demonstrate strong performance and scalability to massive state-of-the-art architectures via training-free guidance of FLUX.2 (32B) in a quantised setting on consumer hardware.