Heterogeneous Vertiport Selection Optimization for On-Demand Air Taxi Services: A Deep Reinforcement Learning Approach
作者: Aoyu Pang, Maonan Wang, Zifan Sha, Wenwei Yue, Changle Li, Chung Shue Chen, Man-On Pun
分类: cs.LG, cs.AI
发布日期: 2026-01-29
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于深度强化学习的异构垂直起降场选择优化方法,提升按需空中出租车服务效率。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 城市空中交通 深度强化学习 垂直起降场选择 多式联运 交通优化
📋 核心要点
- 现有空地一体化交通研究缺乏系统性,难以有效优化乘客的出行路线选择。
- 提出统一的空地交通协调(UAGMC)框架,利用深度强化学习和车联网技术优化垂直起降场选择和空中出租车路线。
- 实验表明,UAGMC相比传统方法,平均旅行时间减少34%,显著提升了出行效率。
📝 摘要(中文)
城市空中交通(UAM)通过利用低空空域缓解城市拥堵,从而减轻地面交通网络的压力,已成为一种变革性的解决方案。为了实现真正高效和无缝的门到门旅行体验,UAM需要与现有的地面交通基础设施紧密结合。然而,目前关于空地交通系统中乘客最佳集成路线策略的研究仍然有限,缺乏系统的探索。为了解决这一差距,我们首先提出了一个统一的优化模型,集成了空中和地面交通的策略选择。该模型捕捉了多式联运网络的动态特性,并将实时交通状况与乘客决策行为结合起来。在此模型的基础上,我们提出了一个统一的空地交通协调(UAGMC)框架,该框架利用深度强化学习(RL)和车联网(V2X)通信来优化垂直起降场的选择,并动态规划空中出租车路线。实验结果表明,与传统的比例分配方法相比,UAGMC实现了平均旅行时间减少34%,提高了整体旅行效率,并为空地交通模式的集成和优化提供了新的见解。这项工作为通过协调空中和地面交通模式来推进智能城市交通解决方案奠定了坚实的基础。
🔬 方法详解
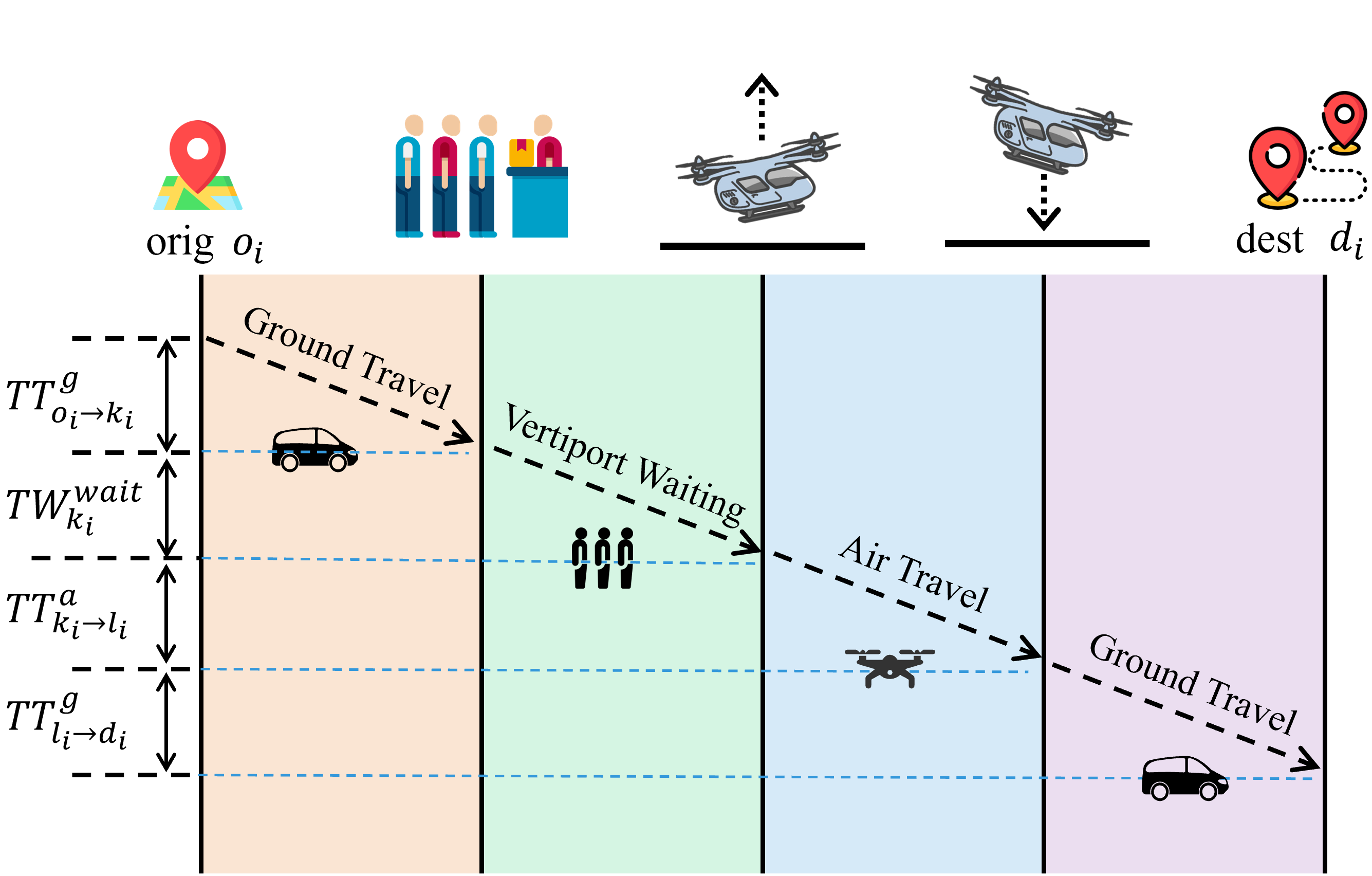
问题定义:论文旨在解决城市空中交通(UAM)中,如何选择最佳垂直起降场,并规划空地一体化交通路线,以最小化乘客的出行时间。现有方法,如比例分配,无法根据实时交通状况和乘客行为动态调整,导致效率低下。
核心思路:论文的核心思路是将空地一体化交通问题建模为一个动态优化问题,并利用深度强化学习(DRL)来学习最优的垂直起降场选择和路线规划策略。通过DRL,系统可以根据实时交通状况和乘客需求,自适应地调整策略,从而提高整体效率。
技术框架:UAGMC框架包含以下主要模块:1) 多式联运网络建模模块,用于构建包含空中和地面交通信息的统一网络;2) 状态表示模块,用于将网络状态(如交通流量、乘客位置等)编码为DRL智能体的输入;3) 动作选择模块,DRL智能体根据当前状态选择垂直起降场和路线;4) 奖励函数设计模块,用于定义智能体的优化目标(如最小化出行时间);5) DRL训练模块,使用历史数据训练智能体。
关键创新:论文的关键创新在于将深度强化学习应用于空地一体化交通的垂直起降场选择和路线规划问题。与传统优化方法相比,DRL能够处理复杂的动态环境,并学习到更优的策略。此外,论文还结合了车联网(V2X)技术,使系统能够获取实时的交通信息,从而做出更明智的决策。
关键设计:论文使用深度Q网络(DQN)作为DRL智能体的基础架构。状态表示包括交通流量、乘客位置、时间等信息。奖励函数设计为负的出行时间,以鼓励智能体选择更快的路线。为了提高训练效率,论文采用了经验回放和目标网络等技术。
🖼️ 关键图片


📊 实验亮点
实验结果表明,UAGMC框架在平均旅行时间方面比传统的比例分配方法减少了34%。这表明UAGMC能够有效地利用空中交通资源,并根据实时交通状况动态调整策略,从而显著提高整体出行效率。该结果验证了深度强化学习在空地一体化交通优化中的有效性。
🎯 应用场景
该研究成果可应用于城市空中交通管理系统,为乘客提供更高效、便捷的出行服务。通过优化垂直起降场的选择和路线规划,可以减少出行时间,缓解城市交通拥堵,并促进城市空中交通的可持续发展。此外,该方法还可以扩展到其他多式联运场景,如铁路、公路和水路运输的集成。
📄 摘要(原文)
Urban Air Mobility (UAM) has emerged as a transformative solution to alleviate urban congestion by utilizing low-altitude airspace, thereby reducing pressure on ground transportation networks. To enable truly efficient and seamless door-to-door travel experiences, UAM requires close integration with existing ground transportation infrastructure. However, current research on optimal integrated routing strategies for passengers in air-ground mobility systems remains limited, with a lack of systematic exploration.To address this gap, we first propose a unified optimization model that integrates strategy selection for both air and ground transportation. This model captures the dynamic characteristics of multimodal transport networks and incorporates real-time traffic conditions alongside passenger decision-making behavior. Building on this model, we propose a Unified Air-Ground Mobility Coordination (UAGMC) framework, which leverages deep reinforcement learning (RL) and Vehicle-to-Everything (V2X) communication to optimize vertiport selection and dynamically plan air taxi routes. Experimental results demonstrate that UAGMC achieves a 34\% reduction in average travel time compared to conventional proportional allocation methods, enhancing overall travel efficiency and providing novel insights into the integration and optimization of multimodal transportation systems. This work lays a solid foundation for advancing intelligent urban mobility solutions through the coordination of air and ground transportation modes. The related code can be found at https://github.com/Traffic-Alpha/UAGMC.