Plug-and-Play Benchmarking of Reinforcement Learning Algorithms for Large-Scale Flow Control
作者: Jannis Becktepe, Aleksandra Franz, Nils Thuerey, Sebastian Peitz
分类: cs.LG
发布日期: 2026-01-21
备注: Code available at https://github.com/safe-autonomous-systems/fluidgym
🔗 代码/项目: GITHUB
💡 一句话要点
FluidGym:首个完全可微的强化学习流体控制基准测试平台
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 强化学习 主动流动控制 基准测试 可微模拟 计算流体动力学
📋 核心要点
- 现有主动流动控制(AFC)的强化学习研究缺乏统一的评估标准,依赖异构的设置和外部CFD求解器,阻碍了领域进展。
- FluidGym提供了一个独立的、完全可微的基准测试套件,它基于PyTorch和GPU加速的PICT求解器,无需外部CFD软件。
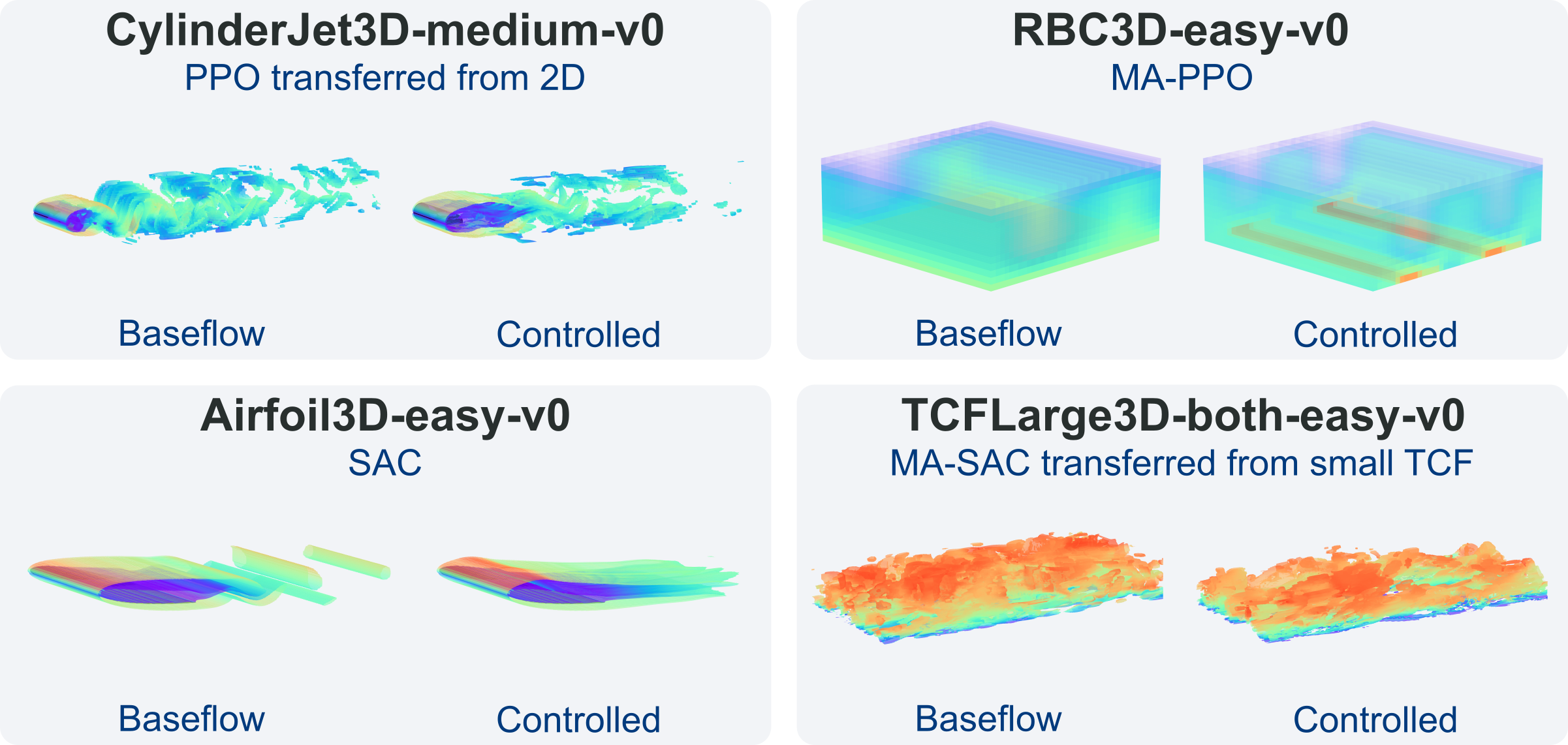
- 通过PPO和SAC算法在FluidGym上进行基线测试,所有环境、数据集和模型均开源,促进了控制方法的系统比较。
📝 摘要(中文)
强化学习(RL)在主动流动控制(AFC)中展现出潜力,但由于现有研究依赖于不同的观测和驱动方案、数值设置和评估协议,该领域的进展难以评估。现有的AFC基准测试试图解决这些问题,但严重依赖外部计算流体动力学(CFD)求解器,并非完全可微,并且对3D和多智能体支持有限。为了克服这些限制,我们推出了FluidGym,这是第一个用于AFC中RL的独立、完全可微的基准测试套件。FluidGym完全基于GPU加速的PICT求解器,在PyTorch中构建,在单个Python堆栈中运行,不需要外部CFD软件,并提供标准化的评估协议。我们展示了PPO和SAC的基线结果,并将所有环境、数据集和训练模型作为公共资源发布。FluidGym能够系统地比较控制方法,为未来基于学习的流动控制研究建立可扩展的基础,可在https://github.com/safe-autonomous-systems/fluidgym获取。
🔬 方法详解
问题定义:现有基于强化学习的主动流动控制研究,由于缺乏标准化的环境和评估协议,难以进行公平的算法比较。此外,现有方法通常依赖于外部CFD求解器,计算成本高昂,且难以进行端到端的可微优化。对3D和多智能体控制的支持也有限。
核心思路:FluidGym的核心思路是构建一个完全可微、独立的强化学习基准测试平台,用于主动流动控制。通过在PyTorch中实现GPU加速的PICT求解器,避免了对外部CFD软件的依赖,实现了高效且可微的流体动力学模拟。标准化的环境和评估协议,使得不同强化学习算法的性能可以公平比较。
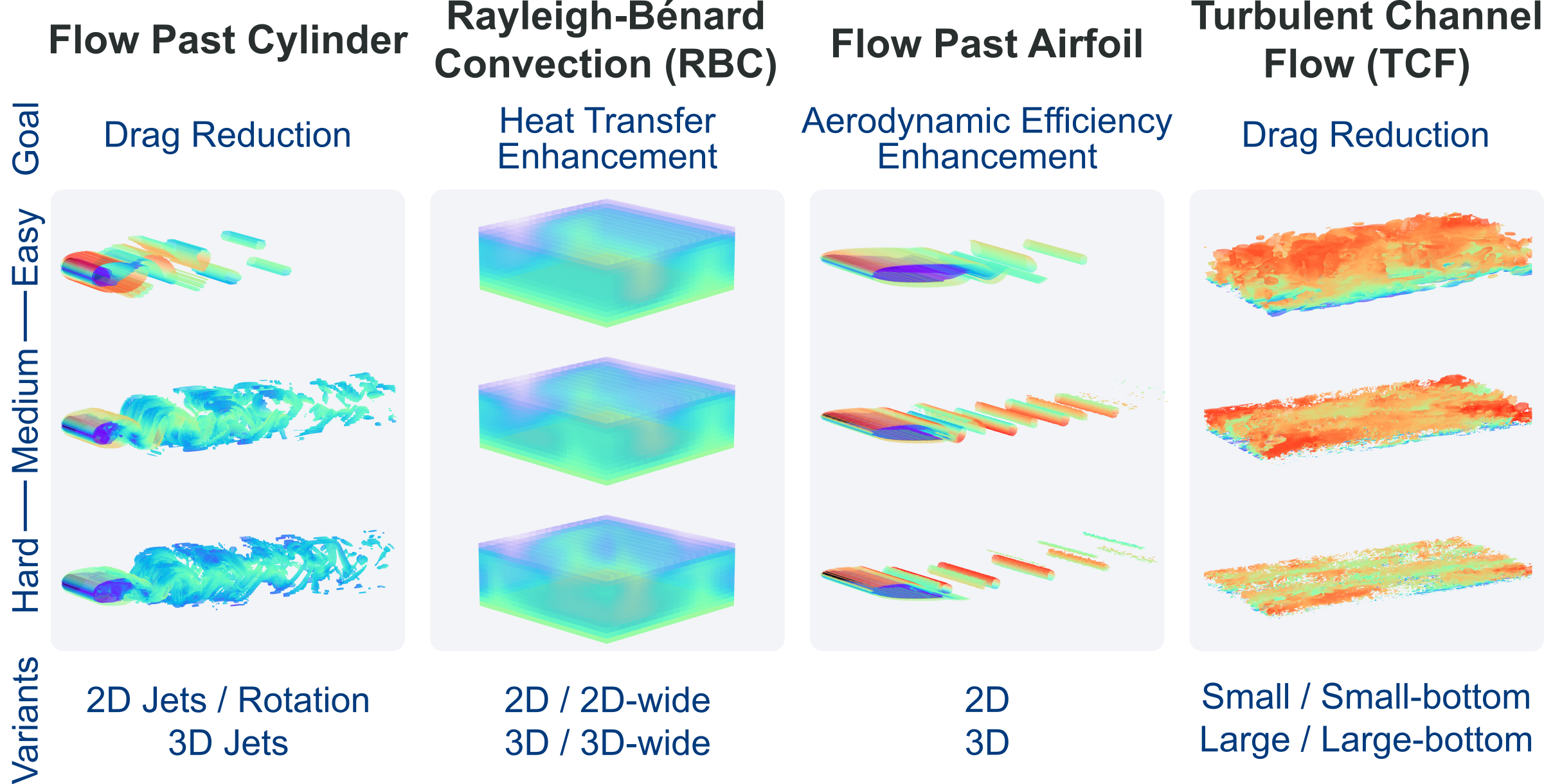
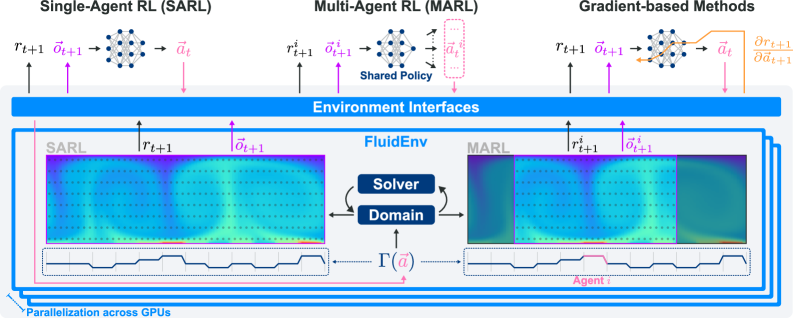
技术框架:FluidGym的整体架构包含以下几个主要模块:1) 基于PyTorch的PICT流体求解器,用于模拟流体动力学环境;2) 一系列标准化的主动流动控制环境,例如圆柱绕流、翼型控制等;3) 基于OpenAI Gym的接口,方便集成各种强化学习算法;4) 标准化的评估协议,用于评估算法的性能。整个框架运行在单个Python堆栈中,易于使用和扩展。
关键创新:FluidGym的关键创新在于其完全可微的流体动力学模拟。通过在PyTorch中实现PICT求解器,可以计算流体状态对控制动作的梯度,从而实现端到端的强化学习优化。此外,FluidGym还提供了标准化的环境和评估协议,使得不同算法的比较更加公平和可靠。
关键设计:FluidGym的关键设计包括:1) 使用GPU加速的PICT求解器,提高了模拟速度;2) 提供多种不同的主动流动控制环境,覆盖了不同的应用场景;3) 使用OpenAI Gym接口,方便集成各种强化学习算法;4) 提供标准化的评估指标,例如阻力系数、升力系数等。
🖼️ 关键图片
📊 实验亮点
论文通过PPO和SAC算法在FluidGym提供的环境中进行了基线测试,验证了平台的可行性和有效性。实验结果表明,FluidGym能够有效地评估不同强化学习算法在主动流动控制任务中的性能。所有环境、数据集和训练模型均已开源,为后续研究提供了便利。
🎯 应用场景
FluidGym为强化学习在主动流动控制领域的应用提供了强大的工具。潜在应用包括:飞行器气动优化、车辆减阻、管道流动控制、冷却系统设计等。该平台能够加速相关算法的研发,并促进在实际工程问题中的应用,有望降低能耗、提高效率。
📄 摘要(原文)
Reinforcement learning (RL) has shown promising results in active flow control (AFC), yet progress in the field remains difficult to assess as existing studies rely on heterogeneous observation and actuation schemes, numerical setups, and evaluation protocols. Current AFC benchmarks attempt to address these issues but heavily rely on external computational fluid dynamics (CFD) solvers, are not fully differentiable, and provide limited 3D and multi-agent support. To overcome these limitations, we introduce FluidGym, the first standalone, fully differentiable benchmark suite for RL in AFC. Built entirely in PyTorch on top of the GPU-accelerated PICT solver, FluidGym runs in a single Python stack, requires no external CFD software, and provides standardized evaluation protocols. We present baseline results with PPO and SAC and release all environments, datasets, and trained models as public resources. FluidGym enables systematic comparison of control methods, establishes a scalable foundation for future research in learning-based flow control, and is available at https://github.com/safe-autonomous-systems/fluidgym.