Decoding Rewards in Competitive Games: Inverse Game Theory with Entropy Regularization
作者: Junyi Liao, Zihan Zhu, Ethan Fang, Zhuoran Yang, Vahid Tarokh
分类: cs.LG, stat.ML
发布日期: 2026-01-19
备注: Extended journal version of ICML 2025 paper. Submitted to Operations Research
💡 一句话要点
提出基于熵正则化的逆博弈论框架,用于竞争博弈中的奖励函数重构。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 逆强化学习 博弈论 奖励函数恢复 量化响应均衡 熵正则化
📋 核心要点
- 现有逆强化学习和博弈论方法在奖励函数恢复方面存在模糊性和非唯一性问题,限制了其应用。
- 论文提出基于量化响应均衡(QRE)的奖励函数可识别性理论,并设计了一种新的奖励函数学习算法。
- 实验结果表明,该算法在静态和动态博弈环境中均有效,并具有良好的可靠性和样本效率。
📝 摘要(中文)
本文提出了一个统一的框架,用于在双人零和矩阵博弈和马尔可夫博弈中,利用熵正则化来恢复奖励函数。该框架旨在根据观察到的玩家策略和行为,重构潜在的奖励函数。由于逆问题的固有模糊性、可行奖励的非唯一性以及有限的观测数据覆盖范围,这项任务极具挑战性。为了应对这些挑战,本文在线性假设下,利用量化响应均衡(QRE)建立了奖励函数的可识别性。在此理论基础上,提出了一种从观察到的行为中学习奖励函数的新算法。该算法适用于静态和动态环境,并可集成不同的方法,如最大似然估计(MLE)。本文为算法的可靠性和样本效率提供了强有力的理论保证。此外,大量的数值研究证明了所提出框架的实际有效性,为竞争环境中的决策提供了新的见解。
🔬 方法详解
问题定义:论文旨在解决在竞争博弈中,如何从观察到的玩家行为(策略和动作)中准确地恢复潜在的奖励函数的问题。现有的逆强化学习和逆博弈论方法面临着奖励函数非唯一性、数据覆盖不足以及逆问题固有的模糊性等挑战,导致奖励函数恢复的准确性和可靠性受到限制。
核心思路:论文的核心思路是利用量化响应均衡(Quantal Response Equilibrium, QRE)来建立奖励函数的可识别性,并结合熵正则化来解决逆问题的不适定性。QRE假设玩家的行为并非完全理性,而是存在一定的随机性,这更符合实际情况。熵正则化则可以平滑奖励函数,避免过拟合,提高泛化能力。
技术框架:整体框架包括以下几个主要步骤:1) 基于线性假设和QRE建立奖励函数的可识别性理论;2) 设计一种新的奖励函数学习算法,该算法可以处理静态和动态博弈环境;3) 将最大似然估计(MLE)等方法集成到该算法中;4) 通过数值实验验证算法的有效性和可靠性。该框架适用于双人零和矩阵博弈和马尔可夫博弈。
关键创新:论文最重要的技术创新点在于:1) 利用QRE建立了奖励函数的可识别性理论,为奖励函数恢复提供了理论基础;2) 提出了一种新的奖励函数学习算法,该算法可以有效地处理逆问题的不适定性,并具有良好的样本效率;3) 将熵正则化引入到奖励函数学习中,提高了算法的泛化能力。与现有方法相比,该方法更具理论支撑,且在实际应用中表现更好。
关键设计:论文的关键设计包括:1) 使用线性函数来表示奖励函数,简化了问题;2) 采用熵正则化来平滑奖励函数,避免过拟合;3) 使用最大似然估计(MLE)来估计奖励函数的参数;4) 设计了一种迭代算法来求解QRE,并更新奖励函数。
🖼️ 关键图片
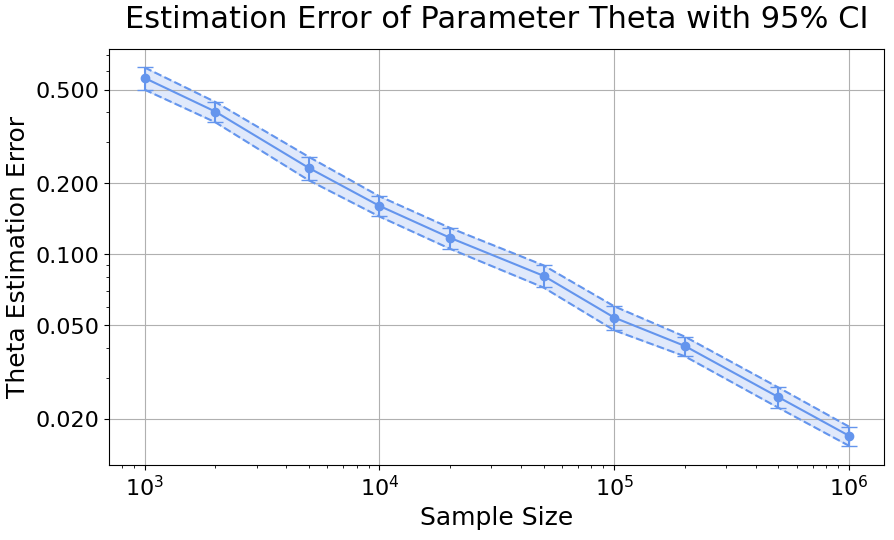
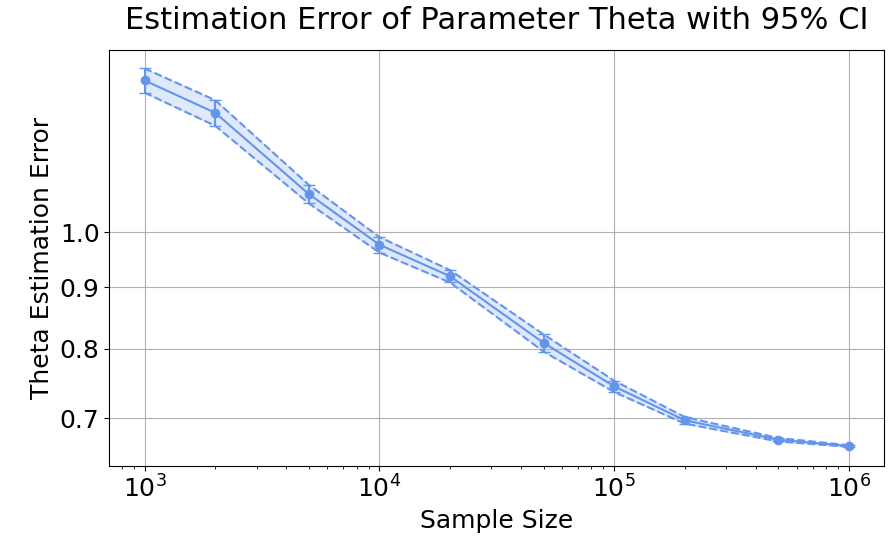
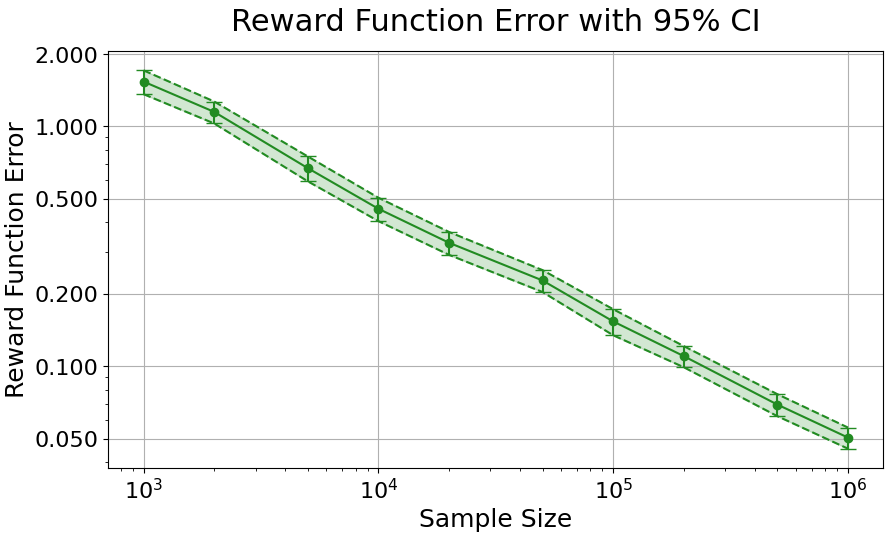
📊 实验亮点
论文通过大量的数值实验验证了所提出框架的有效性。实验结果表明,该算法在静态和动态博弈环境中均能准确地恢复奖励函数,并且具有良好的样本效率。与传统的最大似然估计方法相比,该算法在奖励函数恢复的准确性和鲁棒性方面均有显著提升。具体的性能数据和对比基线在论文中有详细描述。
🎯 应用场景
该研究成果可应用于多个领域,例如:经济学中分析市场参与者的行为动机,安全领域中预测对手的策略,以及机器人领域中设计能够理解和适应竞争环境的智能体。通过准确地恢复奖励函数,可以更好地理解竞争环境中的决策过程,并为制定更有效的策略提供依据。未来,该研究可以扩展到更复杂的博弈场景,例如多智能体博弈和非零和博弈。
📄 摘要(原文)
Estimating the unknown reward functions driving agents' behaviors is of central interest in inverse reinforcement learning and game theory. To tackle this problem, we develop a unified framework for reward function recovery in two-player zero-sum matrix games and Markov games with entropy regularization, where we aim to reconstruct the underlying reward functions given observed players' strategies and actions. This task is challenging due to the inherent ambiguity of inverse problems, the non-uniqueness of feasible rewards, and limited observational data coverage. To address these challenges, we establish the reward function's identifiability using the quantal response equilibrium (QRE) under linear assumptions. Building upon this theoretical foundation, we propose a novel algorithm to learn reward functions from observed actions. Our algorithm works in both static and dynamic settings and is adaptable to incorporate different methods, such as Maximum Likelihood Estimation (MLE). We provide strong theoretical guarantees for the reliability and sample efficiency of our algorithm. Further, we conduct extensive numerical studies to demonstrate the practical effectiveness of the proposed framework, offering new insights into decision-making in competitive environments.