RIPCN: A Road Impedance Principal Component Network for Probabilistic Traffic Flow Forecasting
作者: Haochen Lv, Yan Lin, Shengnan Guo, Xiaowei Mao, Hong Nie, Letian Gong, Youfang Lin, Huaiyu Wan
分类: cs.LG, cs.AI
发布日期: 2025-12-25
备注: Accepted at KDD 2026. 12 pages, 10 figures
💡 一句话要点
RIPCN:一种用于概率交通流预测的道路阻抗主成分网络
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 概率交通流预测 道路阻抗 主成分分析 时空相关性 不确定性估计
📋 核心要点
- 现有概率交通流预测方法难以有效建模交通流不确定性的根本原因,导致预测可靠性不足。
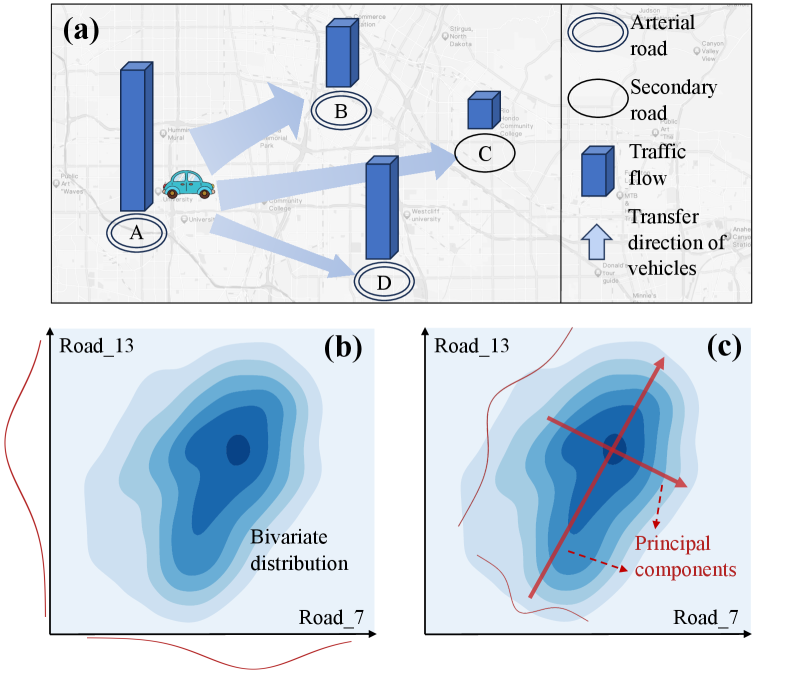
- RIPCN通过动态阻抗演化网络捕捉道路拥堵和流量变化引起的交通转移模式,从而揭示不确定性的直接原因。
- RIPCN利用主成分网络预测未来流量协方差的主导特征向量,有效捕获时空不确定性相关性,提升预测精度。
📝 摘要(中文)
精确的交通流预测对于智能交通服务至关重要,例如导航和网约车。在这些应用中,预测中的不确定性估计非常重要,因为它有助于评估交通风险等级、评估预测可靠性并提供及时预警。因此,概率交通流预测(PTFF)受到了广泛关注,因为它既能产生点预测,又能产生不确定性估计。然而,现有的PTFF方法仍然面临两个关键挑战:(1)如何发现和建模交通流不确定性的原因,以实现可靠的预测;(2)如何捕获不确定性的时空相关性,以实现准确的预测。为了应对这些挑战,我们提出RIPCN,一种道路阻抗主成分网络,它将特定领域的交通理论与时空主成分学习相结合,用于PTFF。RIPCN引入了一个动态阻抗演化网络,该网络捕获由道路拥堵水平和流量可变性驱动的定向交通转移模式,揭示了不确定性的直接原因,并提高了可靠性和可解释性。此外,设计了一个主成分网络来预测未来流量协方差的主导特征向量,使模型能够捕获时空不确定性相关性。这种设计允许准确有效地估计不确定性,同时提高点预测性能。在真实世界数据集上的实验结果表明,我们的方法优于现有的概率预测方法。
🔬 方法详解
问题定义:论文旨在解决概率交通流预测(PTFF)问题,即在预测未来交通流量的同时,估计预测结果的不确定性。现有方法的痛点在于,它们难以有效建模交通流不确定性的根本原因,并且无法充分捕捉不确定性的时空相关性,导致预测结果的可靠性和准确性受到限制。
核心思路:论文的核心思路是将领域知识(道路阻抗)与时空主成分分析相结合。通过引入动态阻抗演化网络,捕捉由道路拥堵和流量变化引起的交通转移模式,从而揭示不确定性的直接原因。同时,利用主成分网络预测未来流量协方差的主导特征向量,从而捕获时空不确定性相关性。
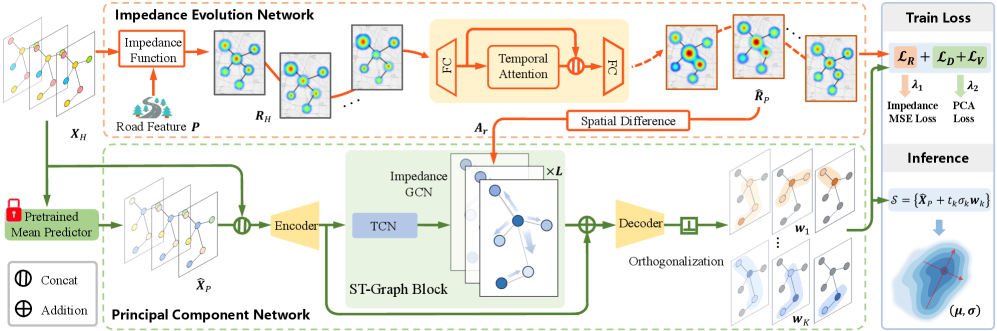
技术框架:RIPCN的整体框架包含两个主要模块:动态阻抗演化网络和主成分网络。动态阻抗演化网络负责建模道路阻抗对交通流的影响,捕捉不确定性的来源。主成分网络负责预测未来流量协方差的主导特征向量,从而捕捉不确定性的时空相关性。这两个模块共同作用,实现准确的概率交通流预测。
关键创新:RIPCN的关键创新在于将道路阻抗的概念引入到概率交通流预测中,并设计了动态阻抗演化网络来建模其影响。与现有方法相比,RIPCN能够更直接地捕捉交通流不确定性的根本原因,从而提高预测的可靠性和可解释性。此外,利用主成分分析来建模不确定性的时空相关性也是一个创新点。
关键设计:动态阻抗演化网络的具体结构和参数设置未知。主成分网络的具体结构和参数设置未知。损失函数的设计可能包括点预测的损失和不确定性估计的损失,具体形式未知。
🖼️ 关键图片

📊 实验亮点
论文在真实世界数据集上进行了实验,结果表明RIPCN方法优于现有的概率预测方法。具体的性能提升数据未知,但摘要中明确指出RIPCN在准确性和效率上都取得了提升。实验结果验证了RIPCN在概率交通流预测方面的有效性。
🎯 应用场景
该研究成果可应用于智能交通系统中的多个领域,例如:更精确的导航路线规划,网约车平台的供需预测和调度优化,以及交通管理部门的风险评估和预警系统。通过提供更可靠的交通流预测和不确定性估计,可以提高交通效率,降低出行成本,并提升交通安全性。
📄 摘要(原文)
Accurate traffic flow forecasting is crucial for intelligent transportation services such as navigation and ride-hailing. In such applications, uncertainty estimation in forecasting is important because it helps evaluate traffic risk levels, assess forecast reliability, and provide timely warnings. As a result, probabilistic traffic flow forecasting (PTFF) has gained significant attention, as it produces both point forecasts and uncertainty estimates. However, existing PTFF approaches still face two key challenges: (1) how to uncover and model the causes of traffic flow uncertainty for reliable forecasting, and (2) how to capture the spatiotemporal correlations of uncertainty for accurate prediction. To address these challenges, we propose RIPCN, a Road Impedance Principal Component Network that integrates domain-specific transportation theory with spatiotemporal principal component learning for PTFF. RIPCN introduces a dynamic impedance evolution network that captures directional traffic transfer patterns driven by road congestion level and flow variability, revealing the direct causes of uncertainty and enhancing both reliability and interpretability. In addition, a principal component network is designed to forecast the dominant eigenvectors of future flow covariance, enabling the model to capture spatiotemporal uncertainty correlations. This design allows for accurate and efficient uncertainty estimation while also improving point prediction performance. Experimental results on real-world datasets show that our approach outperforms existing probabilistic forecasting methods.