Learning solution operator of dynamical systems with diffusion maps kernel ridge regression
作者: Jiwoo Song, Daning Huang, John Harlim
分类: cs.LG, math.NA
发布日期: 2025-12-19 (更新: 2025-12-29)
💡 一句话要点
提出基于扩散映射核岭回归的动力系统解算子学习方法,实现长期预测。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 动力系统 核岭回归 扩散映射 长期预测 数据驱动 几何结构
📋 核心要点
- 现有动力系统预测方法依赖于显式流形重构或吸引子建模,限制了预测性能。
- DM-KRR利用扩散映射构建数据驱动核,隐式适应系统不变集的几何结构。
- 实验表明,DM-KRR在多种系统上优于现有方法,提升了预测精度和数据效率。
📝 摘要(中文)
本文提出了一种简单的核岭回归(KRR)框架,并结合动态感知验证策略,用于复杂动力系统的长期预测。该方法采用源自扩散映射的数据驱动核,提出的扩散映射核岭回归(DM-KRR)方法能够隐式地适应系统不变集的内在几何结构,而无需显式地进行流形重构或吸引子建模,这些过程通常会限制预测性能。在包括光滑流形、混沌吸引子和高维时空流在内的广泛系统上,DM-KRR在准确性和数据效率方面始终优于最先进的随机特征、神经网络和算子学习方法。这些发现强调,长期预测能力不仅取决于模型的表达能力,而且关键在于通过动态一致的模型选择来尊重数据中编码的几何约束。总之,简单性、几何感知和强大的经验性能为可靠有效地学习复杂动力系统指明了一条有希望的道路。
🔬 方法详解
问题定义:论文旨在解决复杂动力系统的长期预测问题。现有方法,如基于神经网络的算子学习方法,通常需要大量的训练数据,并且对系统的几何结构缺乏有效的利用,导致预测精度不高,尤其是在长期预测中,误差会迅速累积。显式的流形重构或吸引子建模计算成本高昂,且容易引入误差。
核心思路:论文的核心思路是利用扩散映射(Diffusion Maps)来构建一个数据驱动的核函数,该核函数能够捕捉动力系统不变集的内在几何结构。通过核岭回归(KRR)框架,将动力系统的演化过程建模为一个算子,并利用该算子进行预测。这种方法避免了显式地进行流形重构或吸引子建模,从而降低了计算复杂度,并提高了预测精度。
技术框架:DM-KRR方法主要包含以下几个步骤:1) 数据收集:从动力系统中采样得到一系列状态数据。2) 扩散映射:利用采样数据构建扩散映射,得到数据点之间的扩散距离。3) 核函数构建:基于扩散距离构建核函数,例如高斯核。4) 核岭回归:利用构建的核函数,训练核岭回归模型,学习动力系统的演化算子。5) 预测:利用学习到的演化算子,对未来的状态进行预测。
关键创新:该方法最重要的创新点在于利用扩散映射来构建核函数,从而能够隐式地捕捉动力系统不变集的几何结构。与传统的核函数相比,这种数据驱动的核函数能够更好地适应动力系统的特性,从而提高预测精度。此外,该方法避免了显式的流形重构或吸引子建模,降低了计算复杂度。
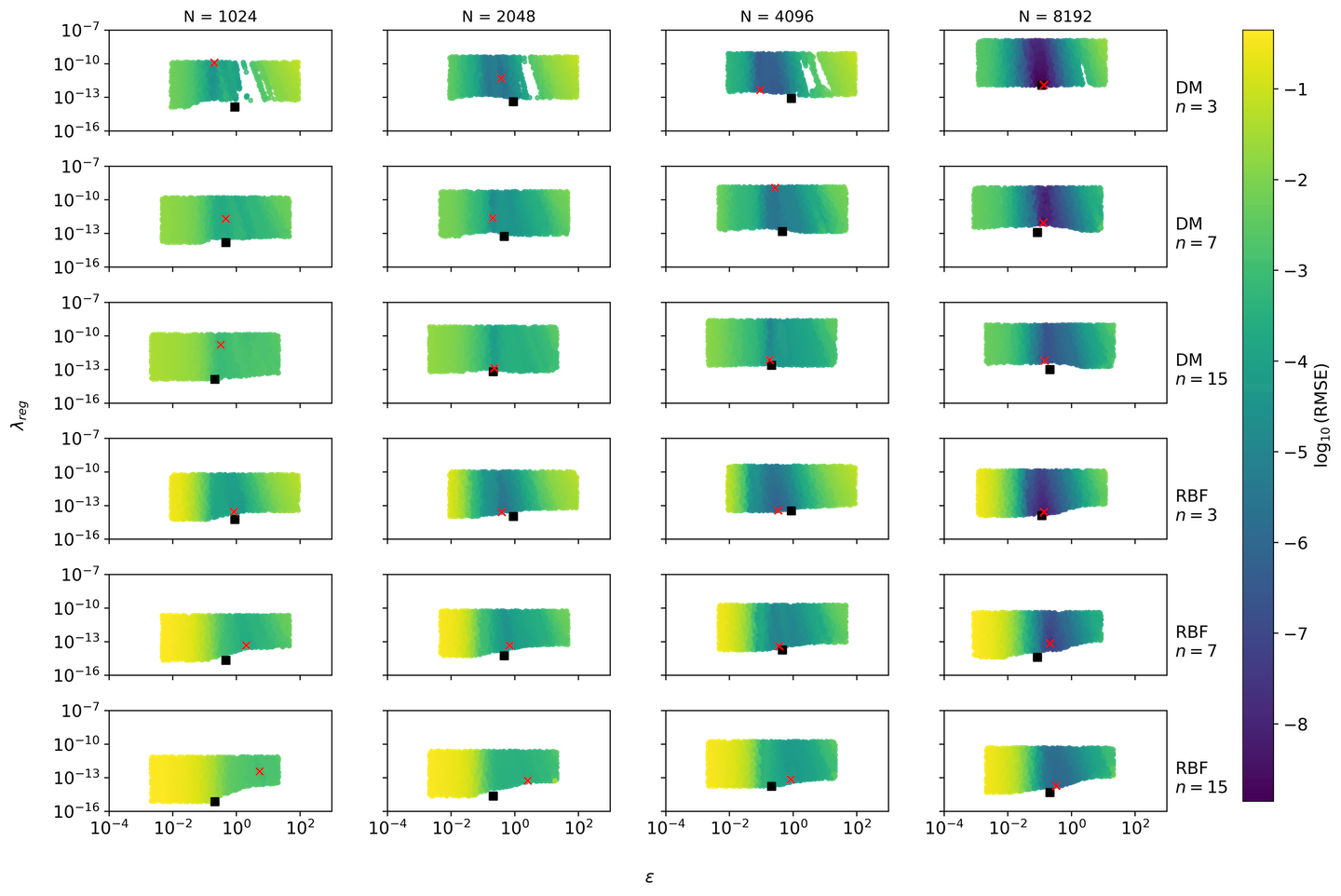
关键设计:关键设计包括:1) 扩散映射的参数选择,例如邻域大小和扩散时间。2) 核函数的选择,例如高斯核的带宽参数。3) 核岭回归的正则化参数选择。论文采用了一种动态感知验证策略来选择这些参数,以保证模型的泛化能力和长期预测精度。损失函数采用均方误差(MSE)。
🖼️ 关键图片
📊 实验亮点
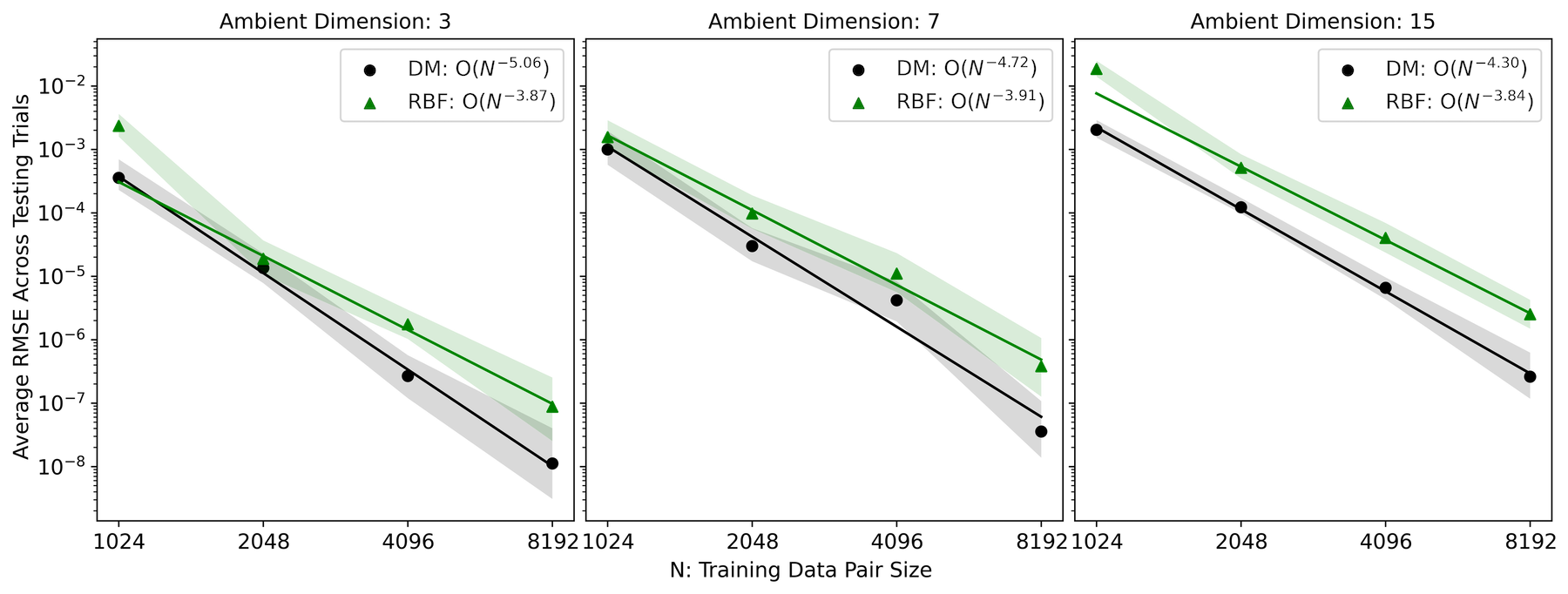
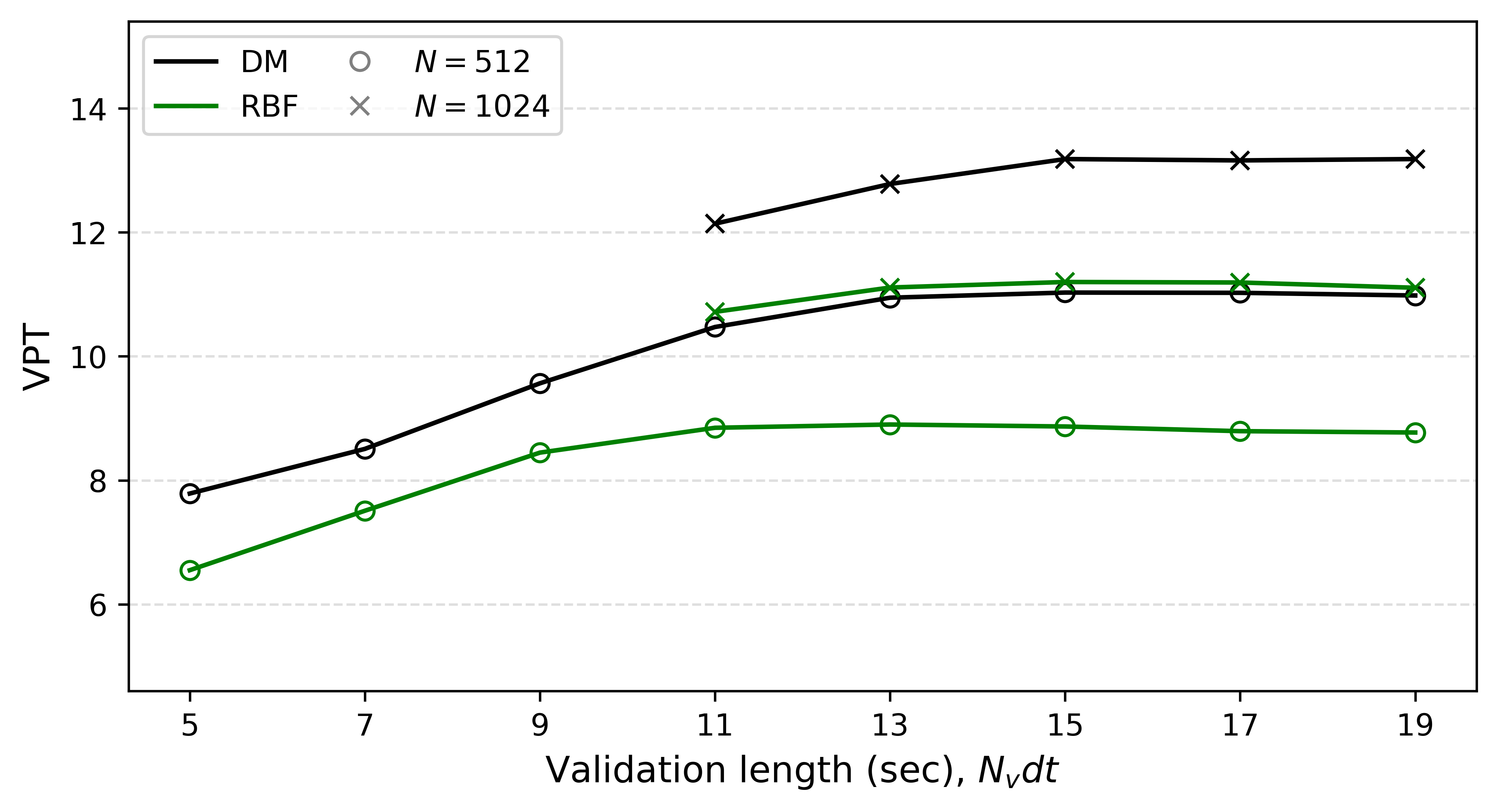
实验结果表明,DM-KRR在多个动力系统上都取得了显著的性能提升。例如,在Lorenz系统上,DM-KRR的长期预测误差明显低于随机特征方法、神经网络方法和算子学习方法。在高维时空流的预测中,DM-KRR也表现出更强的鲁棒性和数据效率。具体而言,DM-KRR在数据量较少的情况下,也能达到与现有方法相当甚至更好的预测精度。
🎯 应用场景
该研究成果可应用于多个领域,例如气候预测、流体动力学、生物系统建模和控制等。通过更准确地预测复杂系统的长期行为,可以为决策提供更可靠的依据,例如预测极端天气事件、优化飞行器设计、控制生物反应器等。该方法在科学研究和工程实践中具有重要的应用价值。
📄 摘要(原文)
In this work, we propose a simple kernel ridge regression (KRR) framework with a dynamic-aware validation strategy for long-term prediction of complex dynamical systems. By employing a data-driven kernel derived from diffusion maps, the proposed Diffusion Maps Kernel Ridge Regression (DM-KRR) method implicitly adapts to the intrinsic geometry of the system's invariant set, without requiring explicit manifold reconstruction or attractor modeling, procedures that often limit predictive performance. Across a broad range of systems, including smooth manifolds, chaotic attractors, and high-dimensional spatiotemporal flows, DM-KRR consistently outperforms state-of-the-art random feature, neural-network and operator-learning methods in both accuracy and data efficiency. These findings underscore that long-term predictive skill depends not only on model expressiveness, but critically on respecting the geometric constraints encoded in the data through dynamically consistent model selection. Together, simplicity, geometry awareness, and strong empirical performance point to a promising path for reliable and efficient learning of complex dynamical systems.