Clone Deterministic 3D Worlds
作者: Zaishuo Xia, Yukuan Lu, Xinyi Li, Yifan Xu, Yubei Chen
分类: cs.LG, cs.AI, cs.CV
发布日期: 2025-10-30 (更新: 2025-11-18)
💡 一句话要点
提出几何正则化世界模型(GRWM),用于高保真克隆确定性3D世界。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 世界模型 几何正则化 对比学习 确定性3D环境 机器人导航
📋 核心要点
- 现有世界模型侧重开放世界随机生成,忽略了确定性3D场景高保真建模的需求。
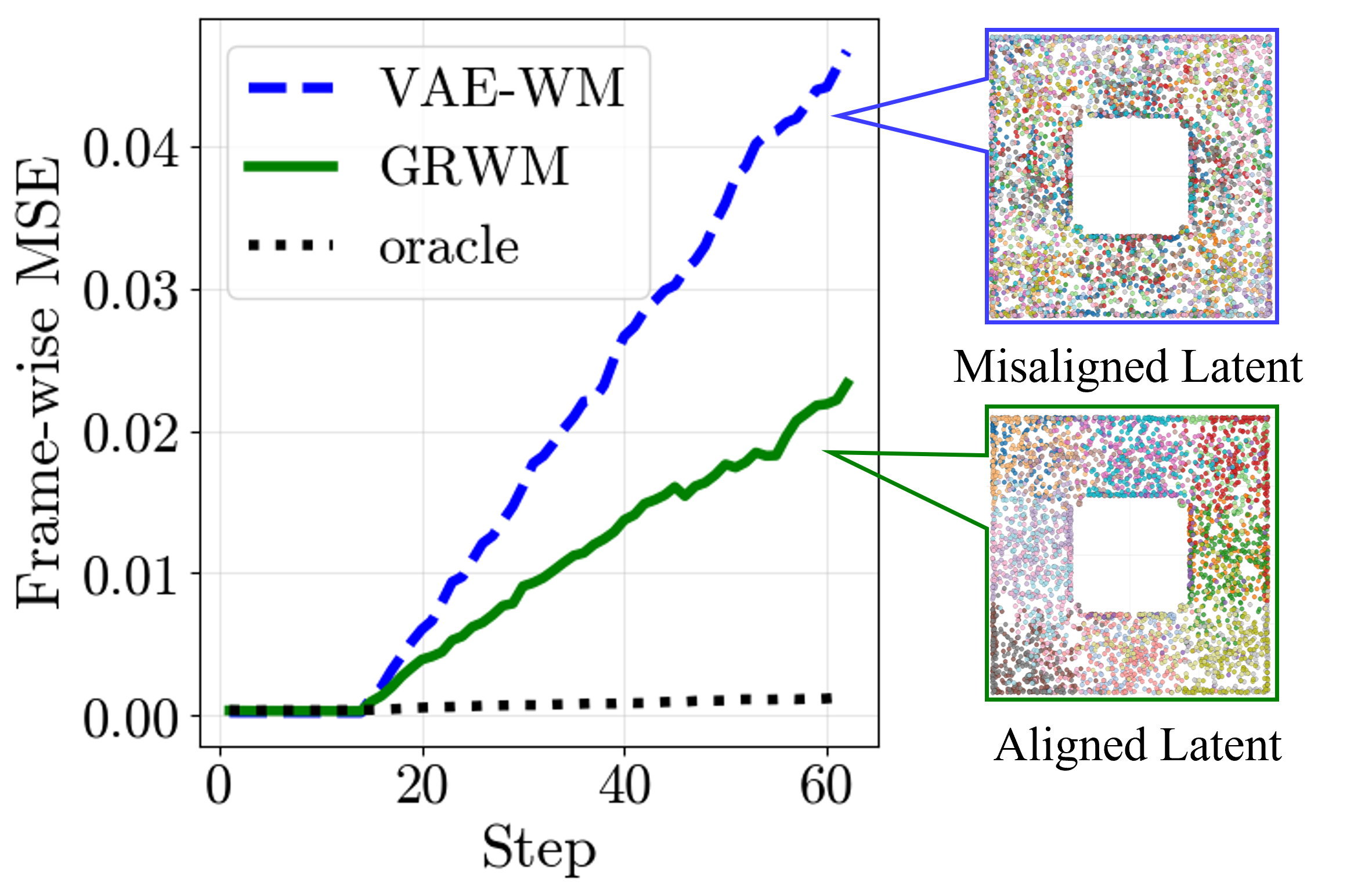
- 提出几何正则化世界模型(GRWM),通过时间对比学习进行几何正则化,优化潜在空间。
- 实验证明,GRWM能有效提升确定性3D世界的克隆保真度,优于现有方法。
📝 摘要(中文)
世界模型是一种模拟世界如何演化的内部模型。给定过去的观测和动作,它可以预测具身智能体及其环境的未来物理状态。精确的世界模型对于智能体在复杂、动态环境中进行有效思考、规划和推理至关重要。然而,现有的世界模型通常侧重于开放世界的随机生成,而忽略了对确定性场景(如固定地图迷宫和静态空间机器人导航)的高保真建模需求。本文旨在构建一个真正精确的世界模型,解决一个基本但尚未解决的问题:构建一个可以完全克隆确定性3D世界的模型。通过诊断实验,定量地证明了高保真克隆是可行的,并且长时程保真度的主要瓶颈是潜在表示的几何结构,而不是动力学模型本身。在此基础上,证明了应用时间对比学习原则作为几何正则化可以有效地管理潜在空间,使其更好地反映底层的物理状态流形,表明对比约束可以作为稳定世界建模的强大归纳偏置;称此方法为几何正则化世界模型(GRWM)。其核心是一个轻量级的几何正则化模块,可以无缝集成到标准自编码器中,重塑其潜在空间,为有效的动力学建模提供稳定的基础。通过关注表示质量,GRWM提供了一个简单而强大的pipeline,用于提高世界模型的保真度。
🔬 方法详解
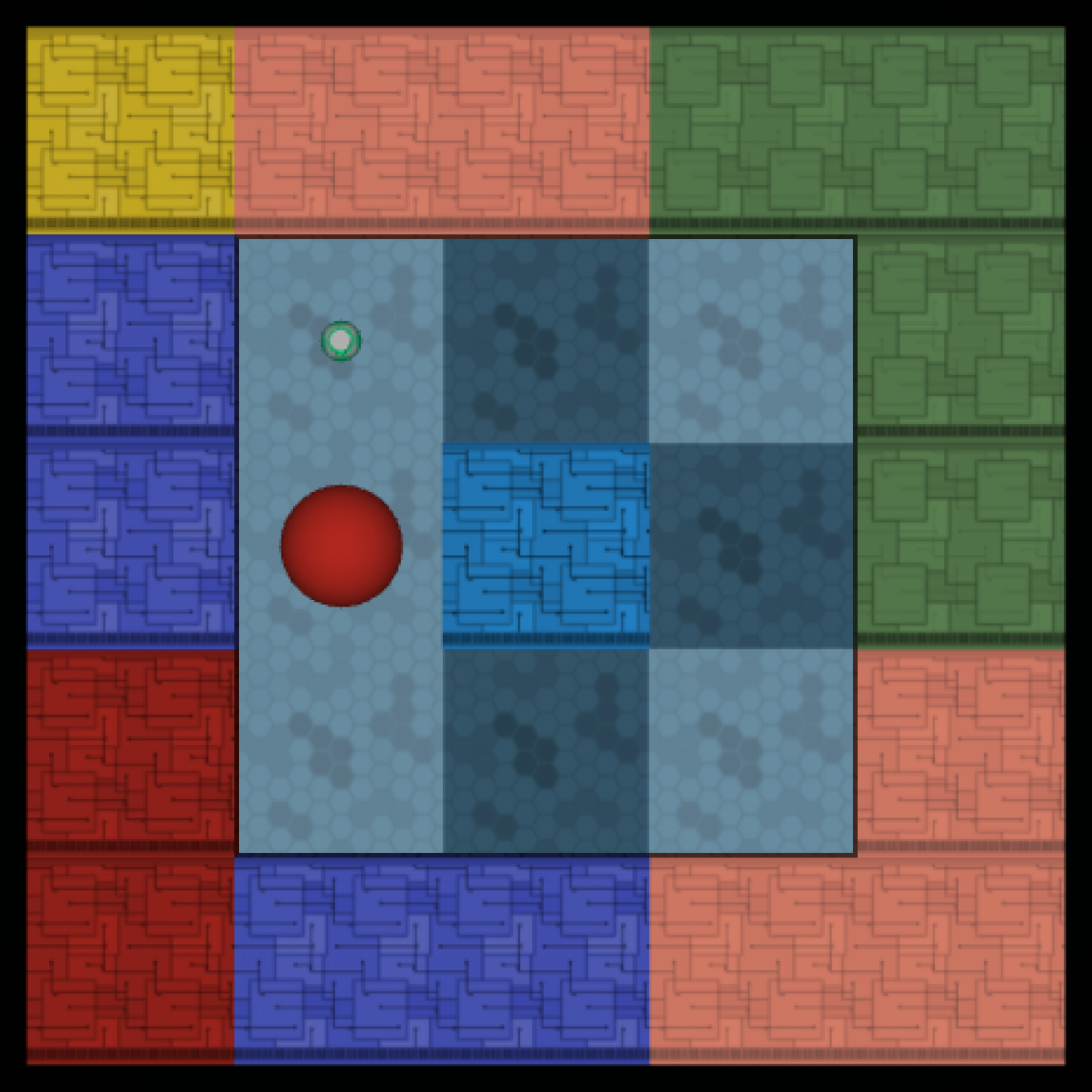
问题定义:论文旨在解决现有世界模型在确定性3D环境中,无法进行高保真克隆的问题。现有方法主要关注开放世界的随机生成,忽略了对固定地图迷宫、静态空间机器人导航等确定性场景的精确建模。这些方法在长时程预测中,由于潜在表示的几何结构不佳,导致性能下降。
核心思路:论文的核心思路是通过几何正则化来改善世界模型的潜在表示。作者认为,长时程保真度的瓶颈在于潜在表示的几何结构,而非动力学模型本身。因此,通过优化潜在空间,使其更好地反映底层的物理状态流形,可以提高世界模型的性能。
技术框架:GRWM的核心是一个轻量级的几何正则化模块,可以无缝集成到标准的自编码器中。整体流程如下:首先,使用自编码器将观测数据编码到潜在空间;然后,应用几何正则化模块对潜在空间进行调整,使其更好地反映物理状态流形;最后,使用动力学模型在潜在空间中进行预测。
关键创新:最重要的技术创新点是使用时间对比学习作为几何正则化,来约束潜在空间。与现有方法不同,GRWM不直接优化动力学模型,而是通过优化潜在表示来提高世界模型的性能。这种方法可以有效地管理潜在空间,使其更好地反映底层的物理状态流形,从而提高长时程预测的准确性。
关键设计:几何正则化模块使用时间对比学习损失函数,鼓励相邻时间步的潜在表示尽可能接近,而远离其他时间步的潜在表示。具体来说,对于每个时间步的潜在表示,选择同一轨迹中相邻时间步的潜在表示作为正样本,选择其他轨迹的潜在表示作为负样本。通过最小化对比损失,可以使潜在空间更好地反映物理状态流形。
🖼️ 关键图片

📊 实验亮点
论文通过实验证明,GRWM在确定性3D世界的克隆任务中,显著优于现有的世界模型。具体来说,GRWM能够生成更准确的未来状态预测,并且在长时程预测中表现出更好的稳定性。实验结果表明,通过几何正则化优化潜在表示,可以有效地提高世界模型的性能。
🎯 应用场景
该研究成果可应用于机器人导航、游戏AI、自动驾驶等领域。例如,在机器人导航中,可以利用GRWM构建精确的环境模型,使机器人能够更好地规划路径和避免障碍物。在游戏AI中,可以利用GRWM创建更逼真的游戏世界,提高游戏体验。在自动驾驶中,可以利用GRWM预测车辆周围环境的变化,提高驾驶安全性。
📄 摘要(原文)
A world model is an internal model that simulates how the world evolves. Given past observations and actions, it predicts the future physical state of both the embodied agent and its environment. Accurate world models are essential for enabling agents to think, plan, and reason effectively in complex, dynamic settings. However, existing world models often focus on random generation of open worlds, but neglect the need for high-fidelity modeling of deterministic scenarios (such as fixed-map mazes and static space robot navigation). In this work, we take a step toward building a truly accurate world model by addressing a fundamental yet open problem: constructing a model that can fully clone a deterministic 3D world. 1) Through diagnostic experiment, we quantitatively demonstrate that high-fidelity cloning is feasible and the primary bottleneck for long-horizon fidelity is the geometric structure of the latent representation, not the dynamics model itself. 2) Building on this insight, we show that applying temporal contrastive learning principle as a geometric regularization can effectively curate a latent space that better reflects the underlying physical state manifold, demonstrating that contrastive constraints can serve as a powerful inductive bias for stable world modeling; we call this approach Geometrically-Regularized World Models (GRWM). At its core is a lightweight geometric regularization module that can be seamlessly integrated into standard autoencoders, reshaping their latent space to provide a stable foundation for effective dynamics modeling. By focusing on representation quality, GRWM offers a simple yet powerful pipeline for improving world model fidelity.