SAFE-D: A Spatiotemporal Detection Framework for Abnormal Driving Among Parkinson's Disease-like Drivers
作者: Hangcheng Cao, Baixiang Huang, Longzhi Yuan, Haonan An, Zihan Fang, Xianhao Chen, Yuguang Fang
分类: cs.LG, cs.HC
发布日期: 2025-10-20
💡 一句话要点
SAFE-D:针对帕金森病患者驾驶异常行为的时空检测框架
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 帕金森病 驾驶异常检测 时空特征 注意力机制 多源数据融合 智能驾驶辅助 CARLA模拟器
📋 核心要点
- 现有方法缺乏对病理因素(如帕金森病)引发的驾驶异常行为的有效检测,这给公共交通安全带来潜在风险。
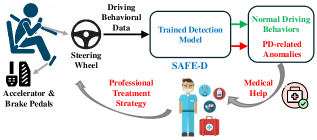
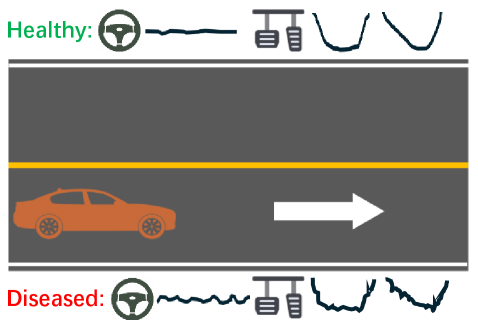
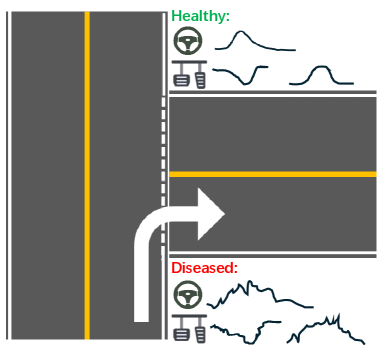
- SAFE-D框架通过分析帕金森病症状与驾驶行为的关联,并结合多源车辆控制数据,构建驾驶行为配置文件,从而检测异常。
- 在Logitech G29平台和CARLA模拟器上的实验表明,SAFE-D能够以96.8%的平均准确率区分正常和帕金森病影响下的驾驶模式。
📝 摘要(中文)
驾驶员的健康状况是驾驶行为调节的关键因素。细微的偏差可能导致操作异常,对公共交通安全构成风险。虽然之前的研究已经开发了针对功能驱动的临时异常(如困倦和分心)的检测机制,但针对病理触发的偏差,特别是慢性疾病引起的偏差的研究有限。为了弥补这一差距,我们研究了帕金森病患者的驾驶行为,并提出了SAFE-D,一种用于检测帕金森相关行为异常以提高驾驶安全的新框架。我们的方法首先分析帕金森病的症状,重点关注主要的运动障碍,并建立与驾驶性能下降的因果关系。为了表示早期帕金森病的亚临床行为变化,我们的框架集成了来自多个车辆控制组件的数据,以构建行为配置文件。然后,我们设计了一个基于注意力的网络,自适应地优先考虑时空特征,从而实现在生理变异下的鲁棒异常检测。最后,我们在Logitech G29平台和CARLA模拟器上验证了SAFE-D,使用来自三个道路地图的数据来模拟真实世界的驾驶。我们的结果表明,SAFE-D在区分正常和受帕金森影响的驾驶模式方面实现了96.8%的平均准确率。
🔬 方法详解
问题定义:论文旨在解决帕金森病患者驾驶过程中出现的异常行为难以被有效检测的问题。现有方法主要关注疲劳、分心等临时性因素,忽略了由帕金森病等慢性疾病引起的、更隐蔽和复杂的驾驶行为偏差。这些偏差可能导致交通事故,威胁驾驶员和公众安全。
核心思路:论文的核心思路是建立帕金森病症状与驾驶行为之间的关联模型,并利用多源数据融合和时空注意力机制,捕捉早期帕金森病患者的亚临床行为变化。通过构建个体化的驾驶行为配置文件,能够更准确地识别异常驾驶模式。
技术框架:SAFE-D框架主要包含以下几个阶段:1) 帕金森病症状分析:研究帕金森病的主要运动障碍,并建立其与驾驶性能下降的因果关系。2) 多源数据融合:整合来自车辆控制组件(如方向盘、油门、刹车等)的数据,构建驾驶行为配置文件。3) 基于注意力机制的时空特征提取:设计一个基于注意力机制的网络,自适应地学习和提取重要的时空特征。4) 异常检测:利用提取的特征,区分正常驾驶行为和帕金森病影响下的异常驾驶行为。
关键创新:该论文的关键创新在于:1) 首次关注帕金森病等病理因素对驾驶行为的影响,填补了该领域的研究空白。2) 提出了基于注意力机制的时空特征提取方法,能够有效捕捉早期帕金森病患者的亚临床行为变化。3) 构建了多源数据融合的驾驶行为配置文件,提高了异常检测的准确性和鲁棒性。
关键设计:注意力机制的具体实现细节(例如注意力头的数量、注意力计算方式等)以及损失函数的设计(例如是否使用了对比损失或三元组损失来增强特征的区分性)在论文中可能有所描述。此外,网络结构的选择(例如使用了LSTM、Transformer或其他时序模型)以及参数设置也会影响最终的性能。这些细节需要参考原文进行更深入的分析。
🖼️ 关键图片
📊 实验亮点
SAFE-D在Logitech G29平台和CARLA模拟器上进行了验证,使用了来自三个不同道路地图的数据。实验结果表明,SAFE-D能够以96.8%的平均准确率区分正常驾驶行为和帕金森病影响下的异常驾驶行为。这一结果表明,SAFE-D在检测帕金森病患者的驾驶异常行为方面具有显著优势。
🎯 应用场景
SAFE-D框架可应用于智能驾驶辅助系统,为帕金森病患者提供驾驶安全保障。通过实时监测驾驶行为,及时发出预警或干预,降低交通事故风险。此外,该技术还可用于评估帕金森病患者的驾驶能力,辅助医生进行诊断和治疗方案制定。未来,该研究可扩展到其他慢性疾病引起的驾驶异常行为检测,提升整体交通安全水平。
📄 摘要(原文)
A driver's health state serves as a determinant factor in driving behavioral regulation. Subtle deviations from normalcy can lead to operational anomalies, posing risks to public transportation safety. While prior efforts have developed detection mechanisms for functionally-driven temporary anomalies such as drowsiness and distraction, limited research has addressed pathologically-triggered deviations, especially those stemming from chronic medical conditions. To bridge this gap, we investigate the driving behavior of Parkinson's disease patients and propose SAFE-D, a novel framework for detecting Parkinson-related behavioral anomalies to enhance driving safety. Our methodology starts by performing analysis of Parkinson's disease symptomatology, focusing on primary motor impairments, and establishes causal links to degraded driving performance. To represent the subclinical behavioral variations of early-stage Parkinson's disease, our framework integrates data from multiple vehicle control components to build a behavioral profile. We then design an attention-based network that adaptively prioritizes spatiotemporal features, enabling robust anomaly detection under physiological variability. Finally, we validate SAFE-D on the Logitech G29 platform and CARLA simulator, using data from three road maps to emulate real-world driving. Our results show SAFE-D achieves 96.8% average accuracy in distinguishing normal and Parkinson-affected driving patterns.