Physics-Informed Learning for Human Whole-Body Kinematics Prediction via Sparse IMUs
作者: Cheng Guo, Giuseppe L'Erario, Giulio Romualdi, Mattia Leonori, Marta Lorenzini, Arash Ajoudani, Daniele Pucci
分类: cs.LG
发布日期: 2025-09-30
💡 一句话要点
提出基于物理信息的稀疏IMU人体全身运动学预测方法,用于人机协作。
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人体运动预测 物理信息学习 惯性测量单元 人机协作 运动学约束
📋 核心要点
- 现有运动预测方法依赖过去姿态,在实际应用中受限,且缺乏对物理约束的考虑。
- 该论文提出一种物理信息学习框架,利用少量IMU数据,结合运动学知识进行人体运动预测。
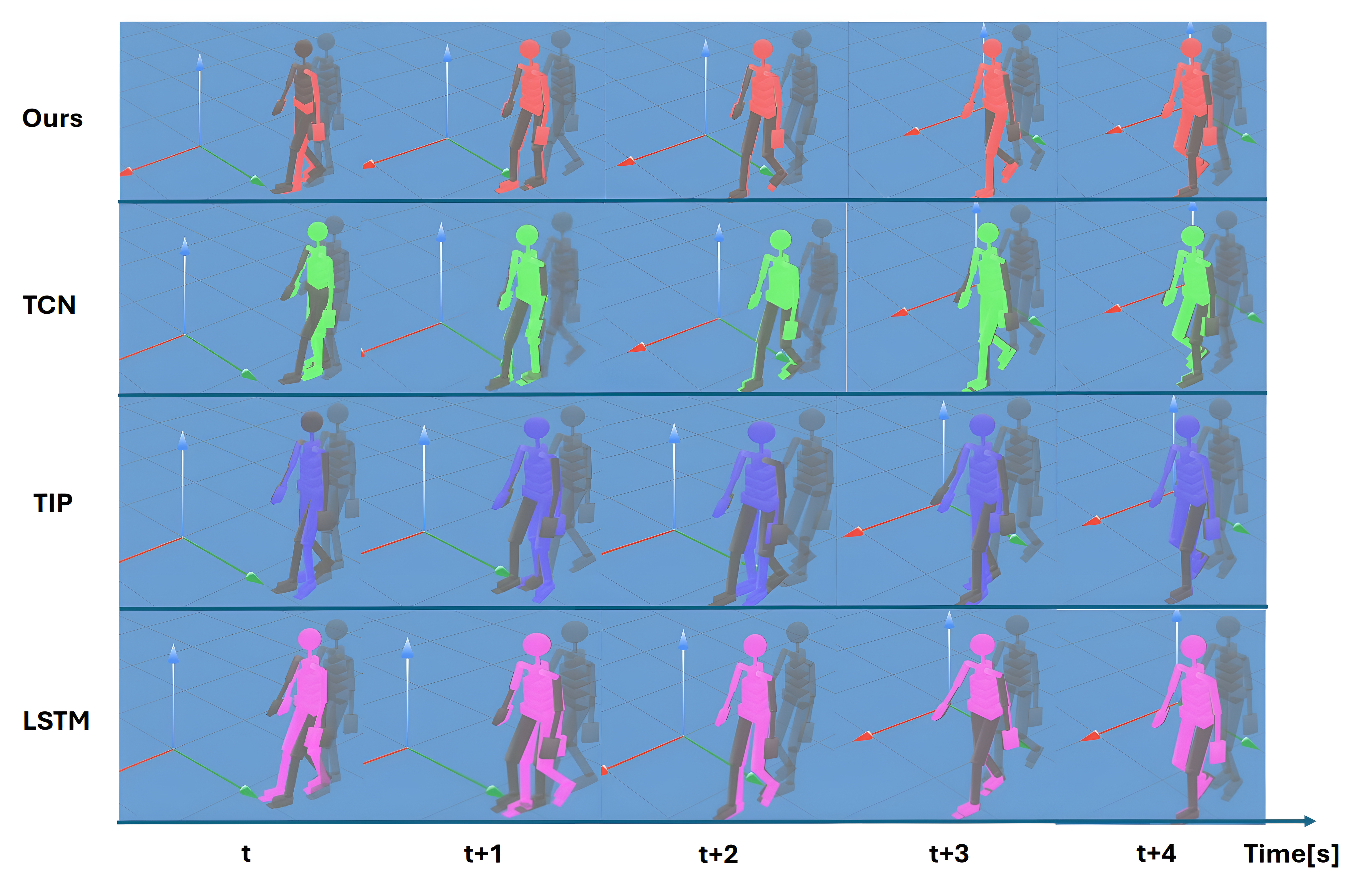
- 实验表明,该方法能实现高精度预测,平滑运动过渡,并具有良好的泛化能力。
📝 摘要(中文)
精确且物理可行的的人体运动预测对于安全、无缝的人机协作至关重要。虽然最近人体运动捕捉技术的进步实现了实时姿态估计,但许多现有方法的实际价值受到缺乏未来预测和未考虑物理约束的限制。传统的运动预测方案严重依赖于过去的姿态,而在实际场景中这些姿态并不总是可用。为了解决这些限制,我们提出了一个物理信息学习框架,该框架将领域知识整合到训练和推理中,以仅使用来自5个IMU的惯性测量来预测人体运动。我们提出了一个考虑人体运动空间特征的网络。在训练期间,我们将正向和微分运动学函数作为额外的损失分量,以规范学习到的关节预测。在推理阶段,我们细化来自先前迭代的预测以更新关节状态缓冲区,该缓冲区用作网络的额外输入。实验结果表明,我们的方法实现了高精度、运动之间的平滑过渡,并且能够很好地推广到未见过的对象。
🔬 方法详解
问题定义:论文旨在解决仅使用少量IMU数据(5个)进行准确且物理可信的人体全身运动学预测问题。现有方法通常依赖大量的过去姿态信息,这在实际应用中可能不可行。此外,许多方法忽略了人体运动的物理约束,导致预测结果不真实。
核心思路:论文的核心思路是将物理信息融入到深度学习框架中,利用前向和微分运动学知识来约束网络的学习过程,从而提高预测的准确性和物理可行性。同时,通过迭代细化预测结果,并利用关节状态缓冲区作为额外输入,进一步提升预测性能。
技术框架:该框架包含训练和推理两个阶段。在训练阶段,使用包含IMU数据和对应人体运动学数据的训练集训练一个神经网络。该网络以IMU数据作为输入,预测人体关节角度。为了融入物理信息,将前向和微分运动学函数作为额外的损失项,对网络的预测结果进行约束。在推理阶段,使用训练好的网络进行运动预测。为了提高预测的准确性,采用迭代细化策略,即利用前一时刻的预测结果更新关节状态缓冲区,并将该缓冲区作为网络的额外输入。
关键创新:该论文的关键创新在于将物理信息融入到深度学习框架中,利用运动学知识来约束网络的学习过程。这种方法不仅提高了预测的准确性,还保证了预测结果的物理可行性。此外,该论文还提出了一种迭代细化策略,进一步提升了预测性能。
关键设计:网络结构的设计考虑了人体运动的空间特征,具体结构未知。损失函数包含两部分:一部分是预测关节角度与真实值之间的误差,另一部分是基于前向和微分运动学的物理约束项。关节状态缓冲区用于存储前一时刻的关节角度信息,作为网络的额外输入。具体的参数设置和损失函数权重未知。
🖼️ 关键图片


📊 实验亮点
该方法仅使用5个IMU,即可实现高精度的人体全身运动学预测。实验结果表明,该方法不仅能够准确预测运动轨迹,还能够保证运动的物理可行性,并且具有良好的泛化能力,能够适应未见过的对象。具体的性能数据和对比基线未知。
🎯 应用场景
该研究成果可应用于人机协作、虚拟现实、康复训练等领域。在人机协作中,准确的人体运动预测可以帮助机器人更好地理解人类意图,从而实现更安全、高效的协作。在虚拟现实中,该方法可以用于实时捕捉和预测用户运动,提供更逼真的交互体验。在康复训练中,可以用于评估患者的运动能力,并提供个性化的训练方案。
📄 摘要(原文)
Accurate and physically feasible human motion prediction is crucial for safe and seamless human-robot collaboration. While recent advancements in human motion capture enable real-time pose estimation, the practical value of many existing approaches is limited by the lack of future predictions and consideration of physical constraints. Conventional motion prediction schemes rely heavily on past poses, which are not always available in real-world scenarios. To address these limitations, we present a physics-informed learning framework that integrates domain knowledge into both training and inference to predict human motion using inertial measurements from only 5 IMUs. We propose a network that accounts for the spatial characteristics of human movements. During training, we incorporate forward and differential kinematics functions as additional loss components to regularize the learned joint predictions. At the inference stage, we refine the prediction from the previous iteration to update a joint state buffer, which is used as extra inputs to the network. Experimental results demonstrate that our approach achieves high accuracy, smooth transitions between motions, and generalizes well to unseen subjects