Train-Once Plan-Anywhere Kinodynamic Motion Planning via Diffusion Trees
作者: Yaniv Hassidof, Tom Jurgenson, Kiril Solovey
分类: cs.LG, cs.AI, cs.RO
发布日期: 2025-08-28 (更新: 2025-09-05)
备注: Accepted to CoRL 2025, Project page: https://sites.google.com/view/ditree. v2: Abstract updated
💡 一句话要点
DiTree:结合扩散树与采样规划,实现一次训练、多场景通用的运动规划
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 运动规划 扩散模型 采样规划 机器人 深度学习
📋 核心要点
- 传统采样规划器在复杂环境中探索效率低,学习方法泛化性差且缺乏安全保证,限制了其在物理机器人上的应用。
- DiTree结合扩散策略(DP)的信息采样能力和采样规划器(SBP)的完备性,实现高效且具有安全保证的运动规划。
- 实验表明,DiTree在OOD场景中比单独的DP或SBP成功率平均高30%,并在真实汽车实验中表现出卓越的轨迹质量和鲁棒性。
📝 摘要(中文)
运动规划旨在满足机器人动力学约束的同时,计算出无碰撞轨迹。采样规划器(SBPs)通过动作传播构建搜索树来探索高维状态空间,常被用于解决该问题。尽管SBPs具有完备性和解质量的全局保证,但由于无信息动作采样,探索速度缓慢。基于学习的方法可以显著加快运行速度,但泛化能力差,且缺乏安全性等关键保证。我们提出了Diffusion Tree (DiTree),它利用扩散策略(DPs)作为信息采样器,在SBPs中高效引导状态空间搜索,从而提供可证明的通用性。DiTree结合了DP对复杂专家轨迹分布的建模能力(以局部观测为条件)和SBPs的完备性,从而为复杂动力系统在少量动作传播迭代中产生可证明安全的解。我们通过将流行的RRT规划器与在单个环境中训练的DP动作采样器相结合来实现DiTree,并展示了其能力。在动态汽车和Mujoco的蚂蚁机器人设置上的OOD场景的综合评估中,DiTree的成功率平均比独立DP或SBPs高30%(对于后者,SBPs完全失败)。除了仿真之外,真实世界的汽车实验证实了DiTree的适用性,即使在严重的sim-to-real差距下也表现出卓越的轨迹质量和鲁棒性。项目网页:https://sites.google.com/view/ditree。
🔬 方法详解
问题定义:论文旨在解决运动规划中采样规划器探索效率低、学习方法泛化性差且缺乏安全保证的问题。现有方法要么依赖于无信息的随机采样,导致探索速度慢;要么依赖于学习策略,但难以泛化到新的环境,并且无法提供安全性保证。
核心思路:论文的核心思路是将扩散策略(DP)作为采样规划器(SBP)的信息采样器。DP能够学习专家轨迹的复杂分布,并根据局部观测提供有信息的采样,从而引导SBP的搜索过程。同时,SBP的完备性保证了最终解的安全性。
技术框架:DiTree的整体框架是将DP集成到SBP中。具体流程如下:1) SBP在状态空间中进行搜索,需要进行动作采样时,不是采用随机采样,而是使用DP作为采样器。2) DP根据当前状态和环境信息,生成一组候选动作。3) SBP从DP生成的候选动作中选择一个进行扩展。4) 重复上述过程,直到找到目标状态或达到最大迭代次数。
关键创新:DiTree的关键创新在于将扩散模型与采样规划相结合,利用扩散模型学习到的先验知识来指导采样过程,从而提高采样效率和规划成功率。与传统的采样规划器相比,DiTree能够更有效地探索状态空间。与单独使用扩散模型进行规划相比,DiTree能够提供安全性保证,并且具有更好的泛化能力。
关键设计:DP的训练采用行为克隆的方式,使用专家轨迹数据进行训练。DP的网络结构可以根据具体任务进行选择,例如可以使用Transformer网络。SBP可以选择RRT等常用的采样规划器。关键参数包括DP的训练数据量、学习率,以及SBP的扩展步长等。
🖼️ 关键图片


📊 实验亮点
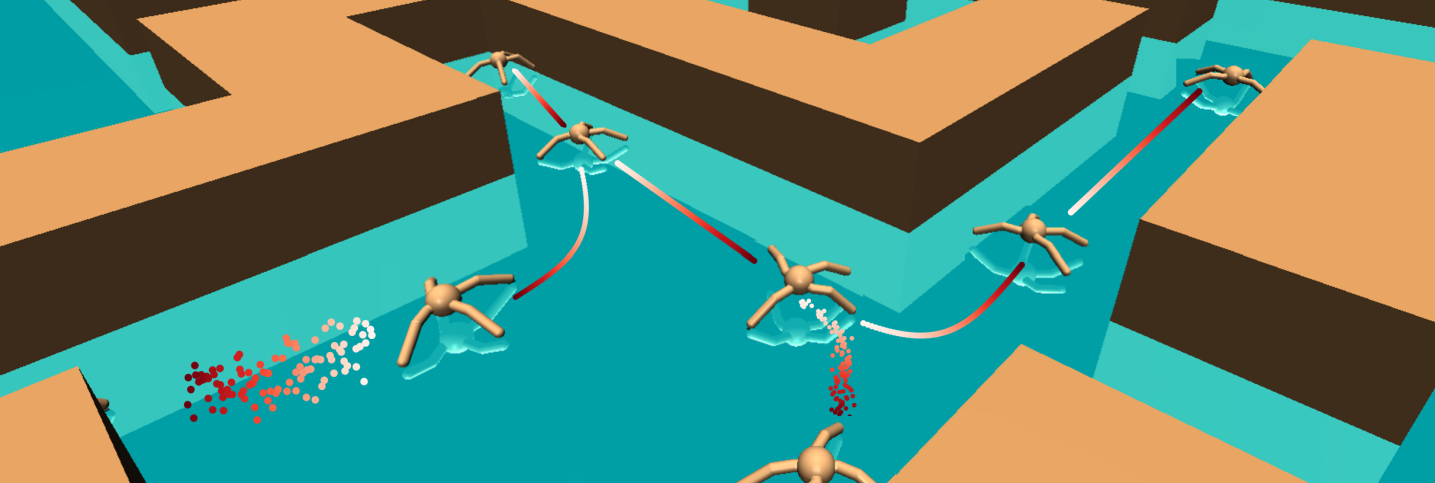
DiTree在动态汽车和Mujoco蚂蚁机器人环境的OOD场景中进行了评估,结果表明,DiTree的成功率平均比单独的DP或SBP高30%。在蚂蚁机器人环境中,传统的SBP完全失效,而DiTree仍然能够成功规划出可行轨迹。此外,真实汽车实验验证了DiTree在实际环境中的适用性,即使存在严重的sim-to-real差距,DiTree也能生成高质量和鲁棒的轨迹。
🎯 应用场景
DiTree可应用于各种需要运动规划的机器人系统,例如自动驾驶汽车、无人机、机械臂等。它尤其适用于需要在复杂环境中进行安全可靠运动规划的场景,例如物流配送、灾难救援、工业自动化等。该研究有望推动机器人技术在实际应用中的普及。
📄 摘要(原文)
Kinodynamic motion planning is concerned with computing collision-free trajectories while abiding by the robot's dynamic constraints. This critical problem is often tackled using sampling-based planners (SBPs) that explore the robot's high-dimensional state space by constructing a search tree via action propagations. Although SBPs can offer global guarantees on completeness and solution quality, their performance is often hindered by slow exploration due to uninformed action sampling. Learning-based approaches can yield significantly faster runtimes, yet they fail to generalize to out-of-distribution (OOD) scenarios and lack critical guarantees, e.g., safety, thus limiting their deployment on physical robots. We present Diffusion Tree (DiTree): a provably-generalizable framework leveraging diffusion policies (DPs) as informed samplers to efficiently guide state-space search within SBPs. DiTree combines DP's ability to model complex distributions of expert trajectories, conditioned on local observations, with the completeness of SBPs to yield provably-safe solutions within a few action propagation iterations for complex dynamical systems. We demonstrate DiTree's power with an implementation combining the popular RRT planner with a DP action sampler trained on a single environment. In comprehensive evaluations on OOD scenarios, DiTree achieves on average a 30% higher success rate compared to standalone DP or SBPs, on a dynamic car and Mujoco's ant robot settings (for the latter, SBPs fail completely). Beyond simulation, real-world car experiments confirm DiTree's applicability, demonstrating superior trajectory quality and robustness even under severe sim-to-real gaps. Project webpage: https://sites.google.com/view/ditree.