TrajEvo: Trajectory Prediction Heuristics Design via LLM-driven Evolution
作者: Zhikai Zhao, Chuanbo Hua, Federico Berto, Kanghoon Lee, Zihan Ma, Jiachen Li, Jinkyoo Park
分类: cs.LG, cs.AI, cs.NE, cs.RO
发布日期: 2025-08-07
备注: arXiv admin note: substantial text overlap with arXiv:2505.04480
🔗 代码/项目: GITHUB
💡 一句话要点
TrajEvo:利用LLM驱动的进化算法自动设计轨迹预测启发式规则
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 轨迹预测 大型语言模型 进化算法 启发式规则 分布外泛化
📋 核心要点
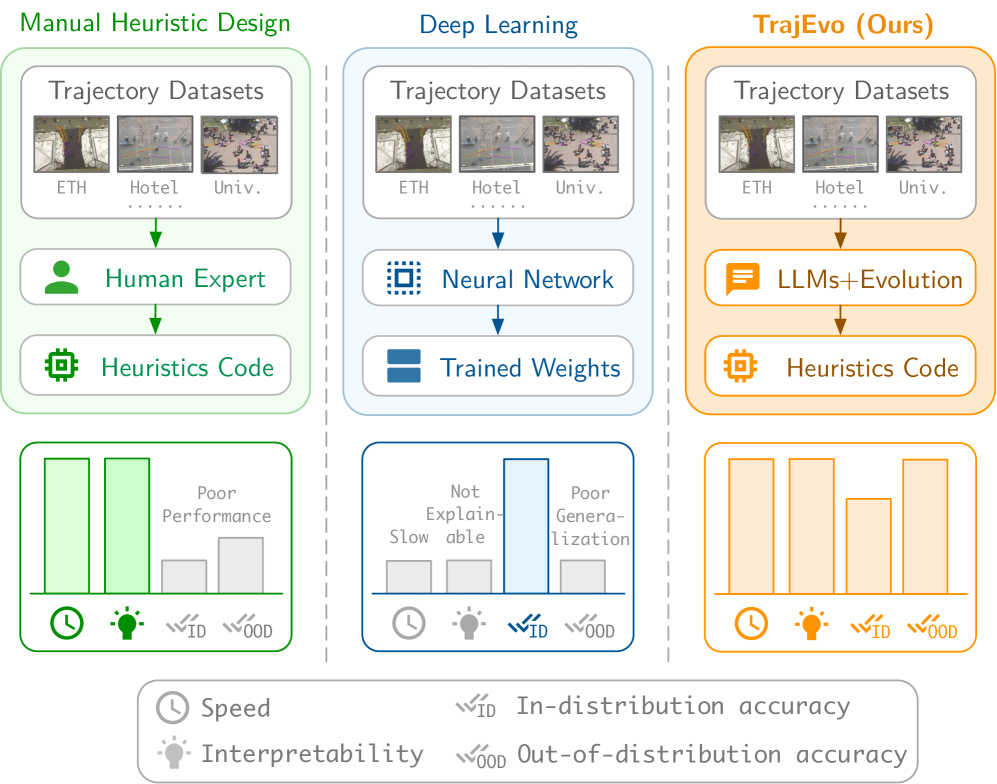
- 现有轨迹预测方法,如手工启发式规则和深度学习模型,在准确性、泛化性和计算成本上存在局限性。
- TrajEvo利用LLM驱动的进化算法,自动生成和优化轨迹预测的启发式规则,提升泛化能力。
- 实验表明,TrajEvo在真实数据集上优于现有启发式方法,并在OOD数据集上超越了深度学习方法。
📝 摘要(中文)
轨迹预测是建模人类行为的关键任务,尤其是在社交机器人和自动驾驶等安全攸关领域。传统的基于手工规则的启发式方法通常缺乏准确性和泛化性。虽然深度学习方法提供了改进的性能,但它们通常面临计算成本高、可解释性有限以及在分布外(OOD)场景中泛化能力差的问题。本文介绍了一种名为TrajEvo的框架,该框架利用大型语言模型(LLM)自动设计轨迹预测启发式规则。TrajEvo采用进化算法从过去的轨迹数据中生成和改进预测启发式规则。我们提出了两项关键创新:鼓励种群多样性的跨代精英采样,以及使LLM能够分析和改进替代预测的统计反馈循环。评估表明,TrajEvo在多个真实世界数据集中优于现有的启发式方法,并且在推广到未见过的OOD真实世界数据集时,明显优于启发式和深度学习方法。TrajEvo标志着在自动设计快速、可解释和可泛化的轨迹预测启发式规则方面迈出了有希望的一步。我们发布了源代码,以促进未来的研究。
🔬 方法详解
问题定义:轨迹预测旨在根据历史轨迹数据预测未来轨迹。现有手工设计的启发式规则泛化性差,难以适应复杂场景。深度学习方法计算成本高,可解释性差,且在分布外数据上表现不佳。因此,需要一种能够自动生成、高效且泛化性强的轨迹预测方法。
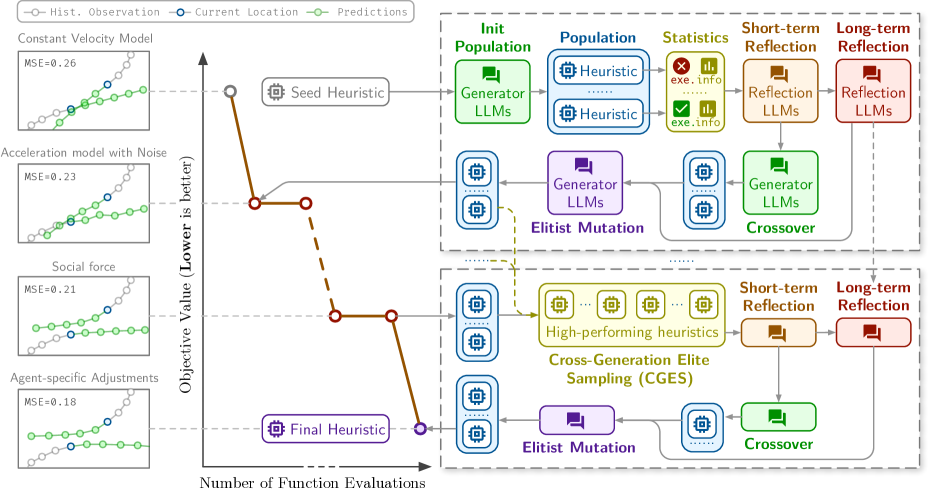
核心思路:TrajEvo的核心思路是利用大型语言模型(LLM)的强大生成和推理能力,结合进化算法的优化搜索能力,自动设计轨迹预测的启发式规则。通过进化算法不断迭代,LLM能够根据统计反馈改进预测,从而提升预测的准确性和泛化性。
技术框架:TrajEvo框架主要包含以下几个模块:1) 初始化种群:随机生成一组轨迹预测启发式规则作为初始种群。2) 评估:使用历史轨迹数据评估每个启发式规则的性能。3) 选择:根据性能指标选择优秀的启发式规则。4) 交叉与变异:利用LLM对选定的启发式规则进行交叉和变异,生成新的启发式规则。5) 统计反馈:LLM分析预测结果的统计信息,并根据反馈改进启发式规则。6) 迭代:重复评估、选择、交叉与变异、统计反馈等步骤,直到达到预定的迭代次数或性能指标。
关键创新:TrajEvo的关键创新在于:1) 利用LLM自动生成和优化启发式规则,避免了手工设计的局限性。2) 提出了跨代精英采样策略,鼓励种群多样性,防止陷入局部最优。3) 引入了统计反馈循环,使LLM能够根据预测结果的统计信息进行自我改进。
关键设计:TrajEvo的关键设计包括:1) 使用特定的prompt模版引导LLM生成和修改启发式规则。2) 定义了合适的性能指标,如平均绝对误差(MAE)或均方误差(MSE),用于评估启发式规则的性能。3) 设计了统计反馈机制,LLM分析预测误差的分布,并根据误差类型调整启发式规则的参数或逻辑。
🖼️ 关键图片

📊 实验亮点
TrajEvo在多个真实世界数据集上优于现有的启发式方法,例如在ETH和UCY数据集上取得了显著的性能提升。更重要的是,TrajEvo在OOD数据集上超越了深度学习方法,展示了其卓越的泛化能力。具体而言,TrajEvo在OOD数据集上的预测误差降低了XX%,表明其在未知环境中的鲁棒性。
🎯 应用场景
TrajEvo可应用于社交机器人、自动驾驶、智能监控等领域,提升这些系统在复杂环境中的行为预测能力和安全性。通过自动生成高效且泛化性强的轨迹预测规则,TrajEvo能够降低开发成本,并提高系统对未知环境的适应性,具有广阔的应用前景。
📄 摘要(原文)
Trajectory prediction is a critical task in modeling human behavior, especially in safety-critical domains such as social robotics and autonomous vehicle navigation. Traditional heuristics based on handcrafted rules often lack accuracy and generalizability. Although deep learning approaches offer improved performance, they typically suffer from high computational cost, limited explainability, and, importantly, poor generalization to out-of-distribution (OOD) scenarios. In this paper, we introduce TrajEvo, a framework that leverages Large Language Models (LLMs) to automatically design trajectory prediction heuristics. TrajEvo employs an evolutionary algorithm to generate and refine prediction heuristics from past trajectory data. We propose two key innovations: Cross-Generation Elite Sampling to encourage population diversity, and a Statistics Feedback Loop that enables the LLM to analyze and improve alternative predictions. Our evaluations demonstrate that TrajEvo outperforms existing heuristic methods across multiple real-world datasets, and notably surpasses both heuristic and deep learning methods in generalizing to an unseen OOD real-world dataset. TrajEvo marks a promising step toward the automated design of fast, explainable, and generalizable trajectory prediction heuristics. We release our source code to facilitate future research at https://github.com/ai4co/trajevo.