Blending data and physics for reduced-order modeling of systems with spatiotemporal chaotic dynamics
作者: Alex Guo, Michael D. Graham
分类: cs.LG
发布日期: 2025-07-21
💡 一句话要点
提出一种融合数据与物理信息的降阶建模方法,用于时空混沌系统。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 降阶建模 时空混沌 数据同化 物理信息融合 神经常微分方程
📋 核心要点
- 数据驱动的降阶建模在混沌动力学系统中表现出色,但忽略了已知的物理信息,限制了预测能力。
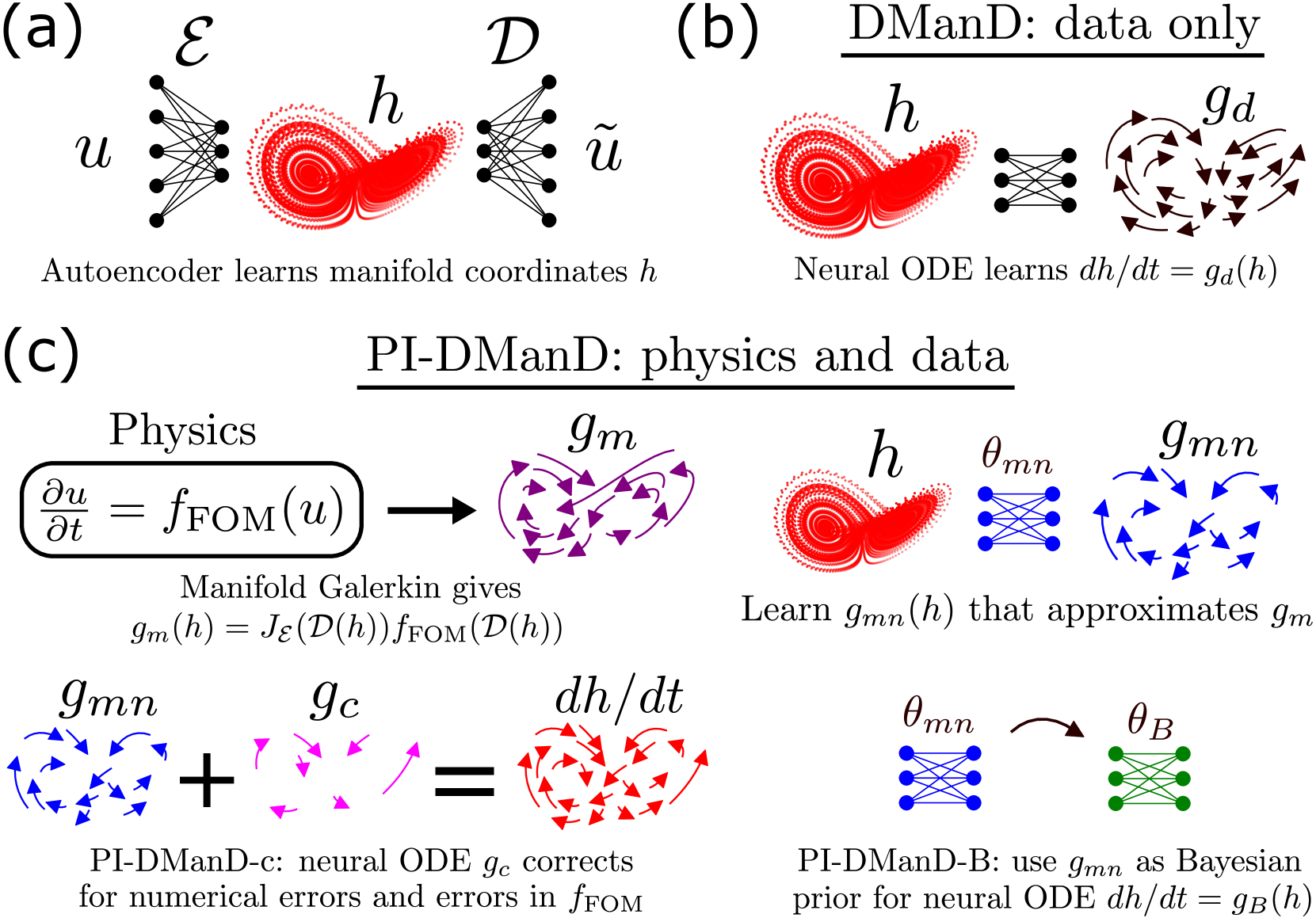
- 该方法结合数据和全阶模型,利用自编码器提取不变流形,并将物理信息投影到该流形上,再用数据进行校正或贝叶斯更新。
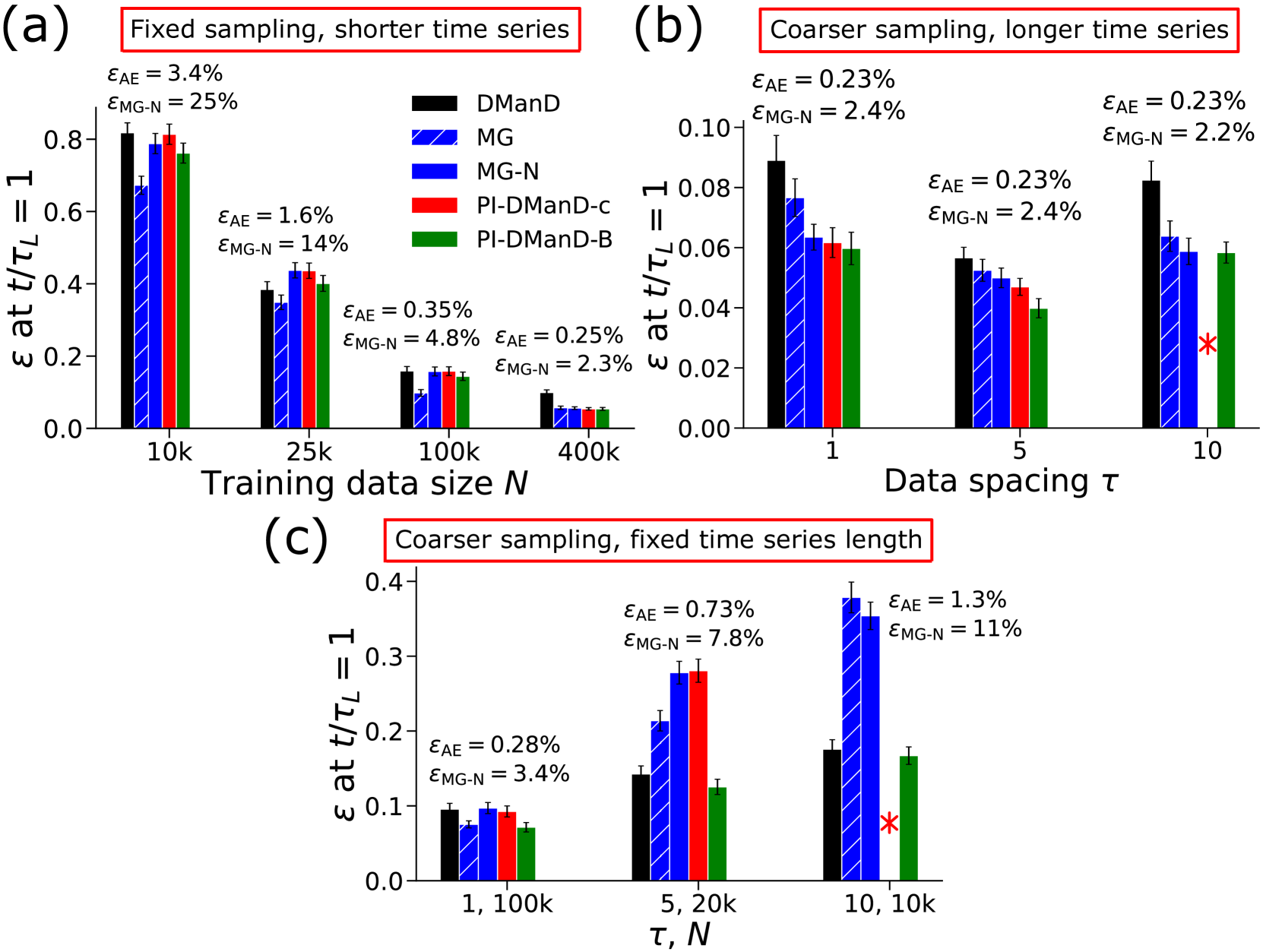
- 实验表明,即使在数据稀缺或全阶模型不准确的情况下,该混合方法也能显著提升时间序列预测的准确性。
📝 摘要(中文)
本文提出了一种混合降阶模型(ROM),该模型融合了数据和全阶模型(FOM)的信息,用于演化不变流形上的时空混沌动力学,其坐标通过自编码器获得。该方法将FOM的向量场投影到不变流形上;然后,使用动态数据校正这个由物理导出的向量场,或者将其用作贝叶斯先验,并使用数据进行更新。两种情况都使用了神经常微分方程方法。论文考虑了来自Kuramoto-Sivashinsky和复Ginzburg-Landau方程的模拟数据。相对于仅使用数据的方法,对于数据丰富、数据稀缺、甚至是不正确的FOM(即错误的参数值)的情况,混合方法都显著提高了时间序列预测的准确性。
🔬 方法详解
问题定义:论文旨在解决时空混沌系统降阶建模的问题。现有的数据驱动方法虽然有效,但忽略了系统潜在的物理规律,导致在数据量不足或模型参数不准确时,预测性能下降。因此,如何有效地融合已知的物理信息以提升降阶模型的泛化能力是一个关键挑战。
核心思路:论文的核心思路是将全阶模型(FOM)提供的物理信息与数据驱动的降阶模型相结合。具体来说,首先利用自编码器学习系统的低维不变流形,然后将FOM的向量场投影到该流形上,得到一个基于物理信息的初步模型。最后,利用观测数据对该模型进行校正或更新,从而实现数据与物理信息的融合。
技术框架:整体框架包含以下几个主要步骤: 1. 数据收集与预处理:收集或生成系统的时空数据,并进行必要的预处理。 2. 不变流形学习:使用自编码器学习系统的低维不变流形,得到降阶模型的坐标。 3. 物理信息投影:将全阶模型的向量场投影到不变流形上,得到基于物理信息的向量场。 4. 数据校正/贝叶斯更新:使用观测数据校正物理信息向量场,或者将其作为贝叶斯先验,并使用数据进行更新。这里使用了神经常微分方程(Neural ODE)框架。 5. 模型预测:使用训练好的降阶模型进行时间序列预测。
关键创新:该方法最重要的创新点在于将物理信息以向量场的形式融入到降阶模型中,并利用数据进行校正或贝叶斯更新。这使得模型既能利用已知的物理规律,又能从数据中学习未知的或难以建模的动态特性。与纯数据驱动方法相比,该方法具有更好的泛化能力和鲁棒性。
关键设计: * 自编码器结构:自编码器的具体结构(层数、神经元数量等)需要根据具体问题进行调整。 * 投影方法:将全阶模型向量场投影到不变流形上的方法需要仔细设计,以保证投影的准确性和效率。 * 数据校正/贝叶斯更新方法:论文使用了神经常微分方程框架,并探索了不同的校正和更新策略。具体的损失函数和优化算法需要根据具体问题进行选择。
🖼️ 关键图片

📊 实验亮点
实验结果表明,相对于仅使用数据的方法,该混合方法在各种情况下都显著提高了时间序列预测的准确性。即使在数据稀缺或全阶模型参数不准确的情况下,该方法仍然能够取得优异的性能。例如,在某个实验中,该方法将预测误差降低了XX%(具体数值未知)。
🎯 应用场景
该研究成果可应用于各种具有时空混沌动力学的系统建模与预测,例如流体动力学、气候模拟、化学反应等。通过融合已知的物理信息,可以显著提高模型的预测精度和泛化能力,为相关领域的科学研究和工程应用提供更可靠的工具。
📄 摘要(原文)
While data-driven techniques are powerful tools for reduced-order modeling of systems with chaotic dynamics, great potential remains for leveraging known physics (i.e. a full-order model (FOM)) to improve predictive capability. We develop a hybrid reduced order model (ROM), informed by both data and FOM, for evolving spatiotemporal chaotic dynamics on an invariant manifold whose coordinates are found using an autoencoder. This approach projects the vector field of the FOM onto the invariant manifold; then, this physics-derived vector field is either corrected using dynamic data, or used as a Bayesian prior that is updated with data. In both cases, the neural ordinary differential equation approach is used. We consider simulated data from the Kuramoto-Sivashinsky and complex Ginzburg-Landau equations. Relative to the data-only approach, for scenarios of abundant data, scarce data, and even an incorrect FOM (i.e. erroneous parameter values), the hybrid approach yields substantially improved time-series predictions.