VoI-Driven Joint Optimization of Control and Communication in Vehicular Digital Twin Network
作者: Lei Lei, Kan Zheng, Jie Mei, Xuemin, Shen
分类: cs.NI, cs.LG, eess.SY
发布日期: 2025-05-12
DOI: 10.1109/MNET.2024.3522588
💡 一句话要点
提出基于信息价值驱动的车辆数字孪生网络控制与通信联合优化框架
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 车辆数字孪生网络 联合优化 信息价值 深度强化学习 车联网
📋 核心要点
- 现有车联网系统在控制和通信方面存在挑战,难以充分利用数字孪生提供的丰富数据和计算资源。
- 论文提出基于信息价值(VoI)的联合优化框架,将控制性能与通信资源分配关联,实现控制和通信的协同优化。
- 仿真结果表明,该框架在车队场景中有效提升了控制性能,验证了VoI驱动的联合优化方法的有效性。
📝 摘要(中文)
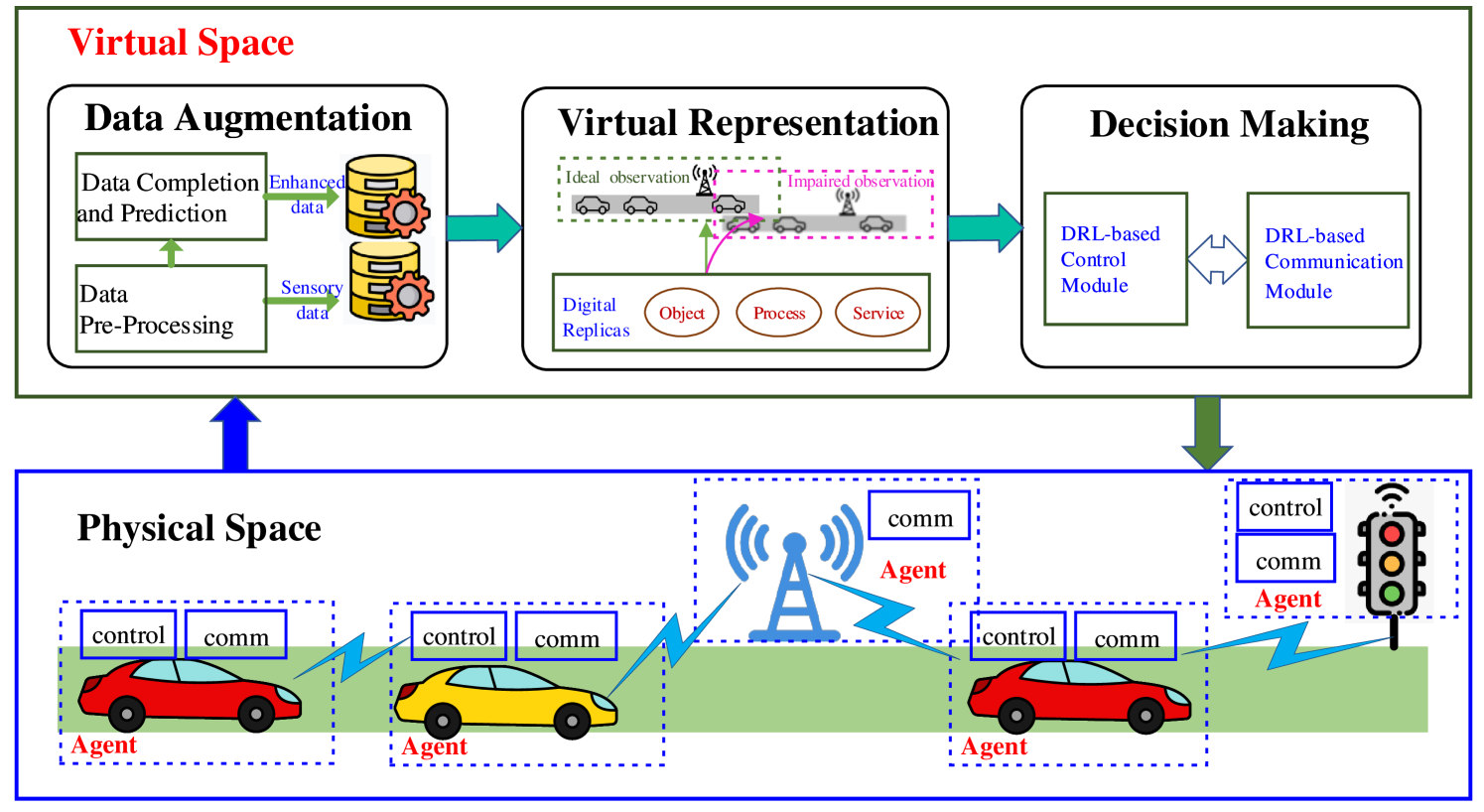
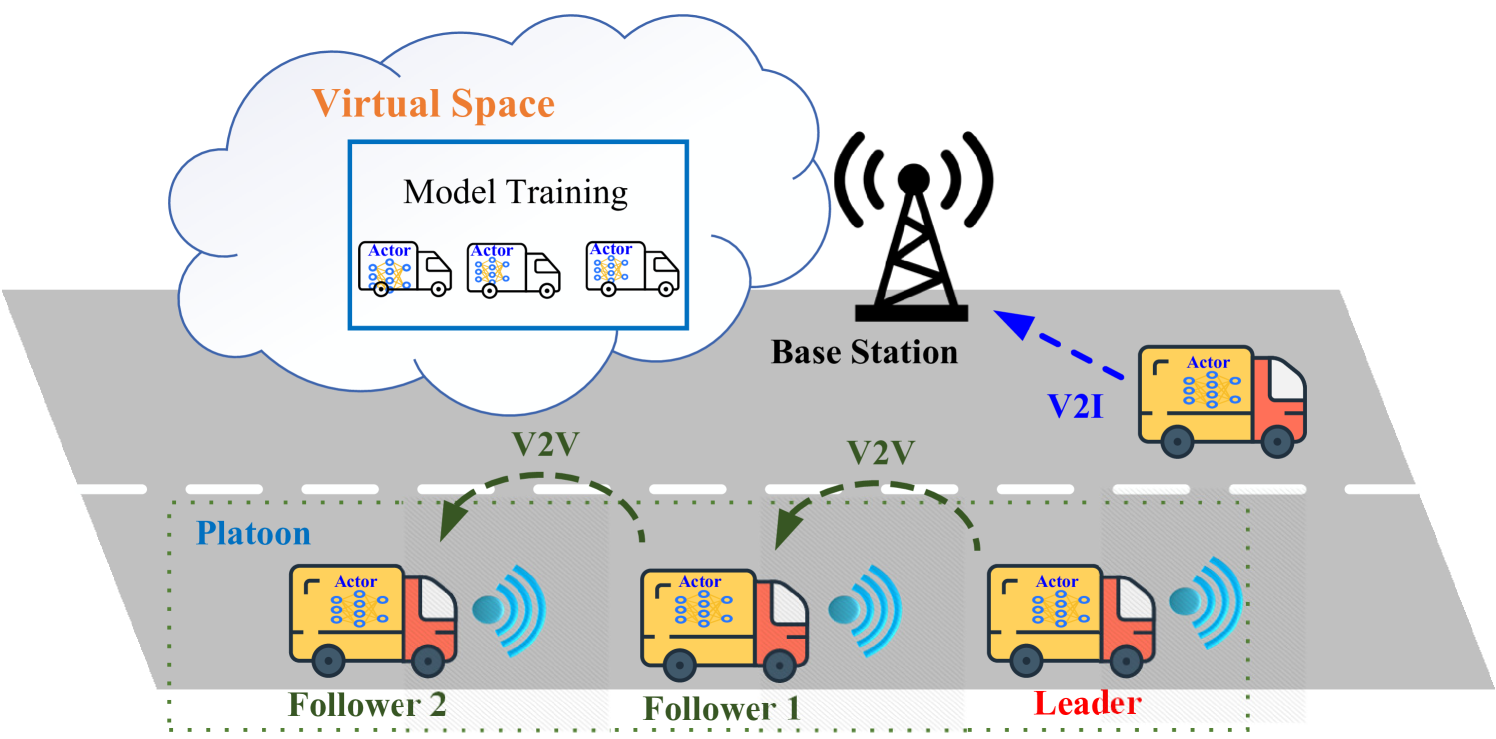
本文提出了一种车辆数字孪生网络(VDTN)架构,旨在利用数字孪生(DT)领域的大量计算资源和时空数据,提升车联网(IoV)系统的通信和控制性能。首先,阐述了VDTN的架构,重点介绍了与控制和通信联合优化相关的关键模块。然后,深入研究了VDTN中联合优化固有的多时间尺度决策过程,特别考察了控制和通信之间的动态相互作用。为了促进联合优化,定义了两个基于控制性能的信息价值(VoI)概念。随后,利用VoI作为控制和通信之间的桥梁,引入了一种新颖的联合优化框架,该框架涉及控制和通信对应的两个深度强化学习(DRL)模块的迭代处理,以推导出最优策略。最后,通过将所提出的框架应用于车队场景的仿真,验证了其有效性。
🔬 方法详解
问题定义:现有车联网系统在控制和通信方面通常是独立设计的,未能充分利用数字孪生提供的海量数据和计算资源。尤其是在车辆编队等场景下,通信质量直接影响控制性能,如何将控制目标融入通信资源分配是亟待解决的问题。现有方法难以在动态变化的车辆网络环境中实现控制和通信的有效协同。
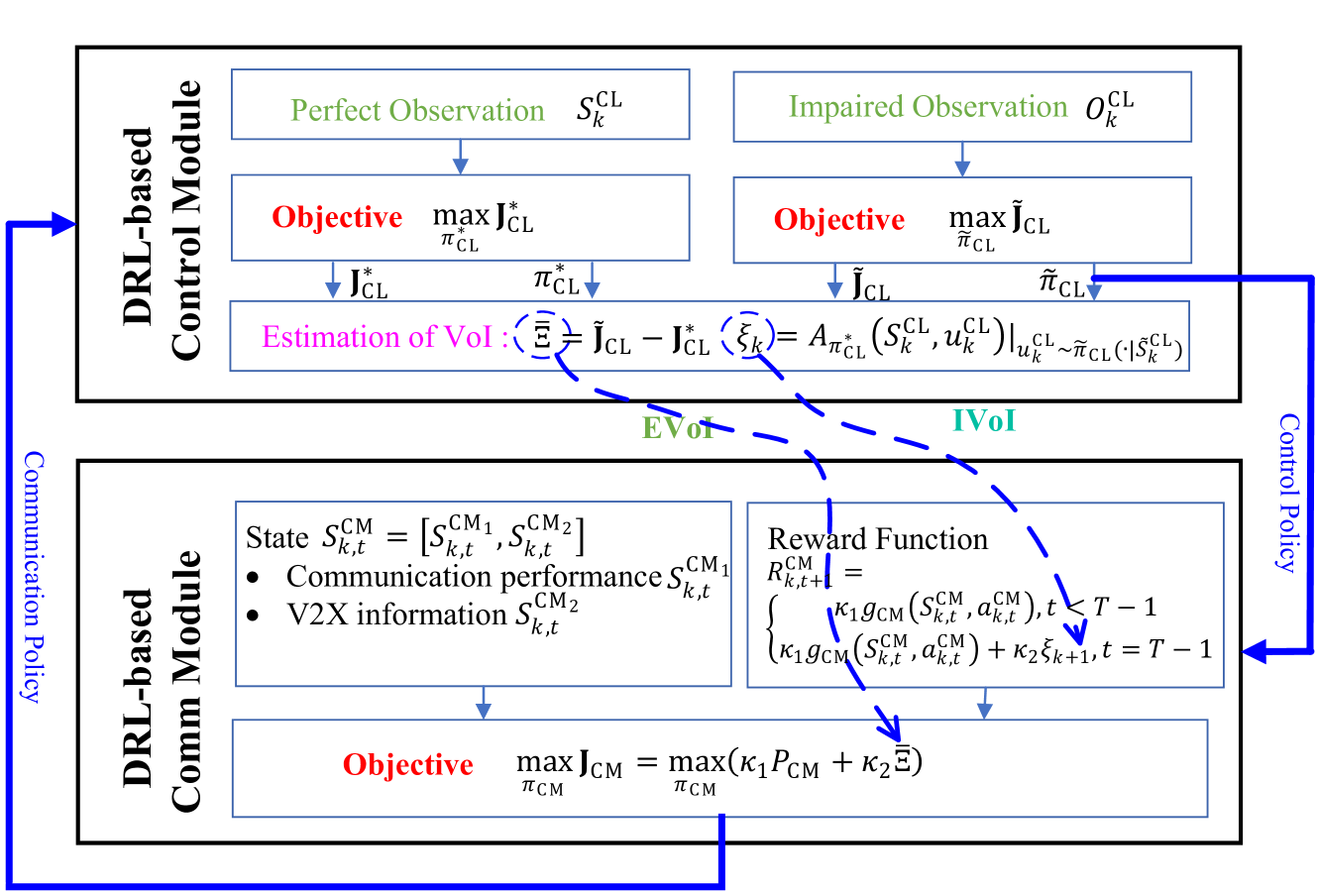
核心思路:论文的核心思路是利用“信息价值”(Value of Information, VoI)作为桥梁,将控制性能的需求映射到通信资源分配上。具体来说,VoI衡量了通信质量对控制性能的影响程度,通过优化通信资源分配来最大化整体的控制性能。这种方法将控制目标直接融入通信决策中,实现了控制和通信的联合优化。
技术框架:该框架包含车辆数字孪生网络(VDTN),以及控制和通信两个主要的优化模块。首先,VDTN负责收集和处理车辆的时空数据,并提供计算资源。控制模块基于DRL算法,根据车辆状态和环境信息生成控制策略。通信模块也基于DRL算法,根据控制模块的需求和网络状态,分配通信资源。两个模块通过VoI进行信息交互,迭代优化,最终达到控制和通信的协同优化。
关键创新:论文的关键创新在于提出了基于控制性能的VoI概念,并将其应用于控制和通信的联合优化。传统的联合优化方法通常难以量化控制需求对通信的影响,而VoI提供了一种有效的量化手段。此外,论文还设计了一种基于DRL的迭代优化框架,能够适应动态变化的车辆网络环境。
关键设计:论文定义了两种VoI:一种是基于状态估计的VoI,另一种是基于控制动作的VoI。状态估计VoI衡量了通信质量对车辆状态估计精度的影响,控制动作VoI衡量了通信质量对控制动作执行效果的影响。两个DRL模块分别使用深度Q网络(DQN)进行训练,损失函数的设计考虑了控制性能和通信成本。具体的网络结构和参数设置在论文中有详细描述,但摘要中未提供具体数值。
🖼️ 关键图片
📊 实验亮点
论文通过仿真实验验证了所提出框架的有效性。在车队场景中,与传统的独立控制和通信方法相比,该框架能够显著提高车队的稳定性和控制精度。具体的性能提升数据在摘要中未给出,需要在论文正文中查找。
🎯 应用场景
该研究成果可应用于自动驾驶、车队管理、智能交通等领域。通过优化车辆间的通信和控制,可以提高交通效率、降低事故风险、提升驾驶体验。未来,随着6G技术的普及和数字孪生技术的成熟,该方法有望在更复杂的车辆网络环境中发挥更大的作用。
📄 摘要(原文)
The vision of sixth-generation (6G) wireless networks paves the way for the seamless integration of digital twins into vehicular networks, giving rise to a Vehicular Digital Twin Network (VDTN). The large amount of computing resources as well as the massive amount of spatial-temporal data in Digital Twin (DT) domain can be utilized to enhance the communication and control performance of Internet of Vehicle (IoV) systems. In this article, we first propose the architecture of VDTN, emphasizing key modules that center on functions related to the joint optimization of control and communication. We then delve into the intricacies of the multitimescale decision process inherent in joint optimization in VDTN, specifically investigating the dynamic interplay between control and communication. To facilitate the joint optimization, we define two Value of Information (VoI) concepts rooted in control performance. Subsequently, utilizing VoI as a bridge between control and communication, we introduce a novel joint optimization framework, which involves iterative processing of two Deep Reinforcement Learning (DRL) modules corresponding to control and communication to derive the optimal policy. Finally, we conduct simulations of the proposed framework applied to a platoon scenario to demonstrate its effectiveness in ensu