Network-wide Freeway Traffic Estimation Using Sparse Sensor Data: A Dirichlet Graph Auto-Encoder Approach
作者: Qishen Zhou, Yifan Zhang, Michail A. Makridis, Anastasios Kouvelas, Yibing Wang, Simon Hu
分类: cs.LG
发布日期: 2025-03-20
备注: This work has been submitted to the IEEE for possible publication
DOI: 10.1109/TITS.2025.3610911
💡 一句话要点
提出DGAE模型,利用稀疏传感器数据实现全路网交通状态估计,提升跨城市迁移能力。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱六:视频提取与匹配 (Video Extraction)
关键词: 交通状态估计 图神经网络 狄利克雷能量 特征传播 有向图 智能交通系统 数据驱动 跨城市迁移
📋 核心要点
- 现有交通状态估计方法难以处理无传感器路段,常用零填充引入偏差,影响图消息传播。
- DGAE模型通过有向图DEFP、潜在空间编码和物理引导传播机制,克服了现有方法的局限性。
- 实验表明,DGAE在多个数据集上优于现有方法,并具有良好的跨城市迁移能力,DEFP4D在极稀疏条件下表现出色。
📝 摘要(中文)
全路网交通状态估计(TSE)旨在利用稀疏部署的传感器推断完整的路网交通状态,在智能交通系统中至关重要。随着数据驱动方法的发展,交通动态建模取得了显著进展。然而,TSE对数据驱动方法提出了根本性的挑战,因为历史模式无法在无传感器路段进行局部学习。虽然归纳图学习在估计无传感器位置的状态方面显示出希望,但现有方法通常通过用零填充来处理未观察到的位置,从而给敏感的图消息传播带来偏差。最近提出的基于狄利克雷能量的特征传播(DEFP)方法通过消除零填充的需要,在未观察到的节点分类中实现了最先进的(SOTA)性能。然而,将其应用于TSE面临三个关键挑战:无法处理有向交通网络,交通空间相关性建模中的强假设,以及忽略了不同模式(例如,拥堵和自由流动)的独特传播规则。我们提出了DGAE,一种新颖的归纳图表示模型,通过理论上导出的有向图DEFP(DEFP4D),通过DEFP4D引导的潜在空间编码增强空间表示学习,以及分别处理拥堵和自由流动模式的物理引导传播机制来解决这些挑战。在三个交通数据集上的实验表明,DGAE优于现有的SOTA方法,并表现出强大的跨城市可迁移性。此外,DEFP4D可以作为独立的轻量级解决方案,在极稀疏的传感器条件下表现出卓越的性能。
🔬 方法详解
问题定义:论文旨在解决利用稀疏传感器数据进行全路网交通状态估计的问题。现有方法在处理无传感器路段时,通常采用零填充,这会引入偏差,影响图神经网络的消息传递过程,导致估计精度下降。此外,现有方法难以处理有向交通网络,对交通空间相关性建模存在较强假设,并且忽略了拥堵和自由流等不同交通模式的传播特性差异。
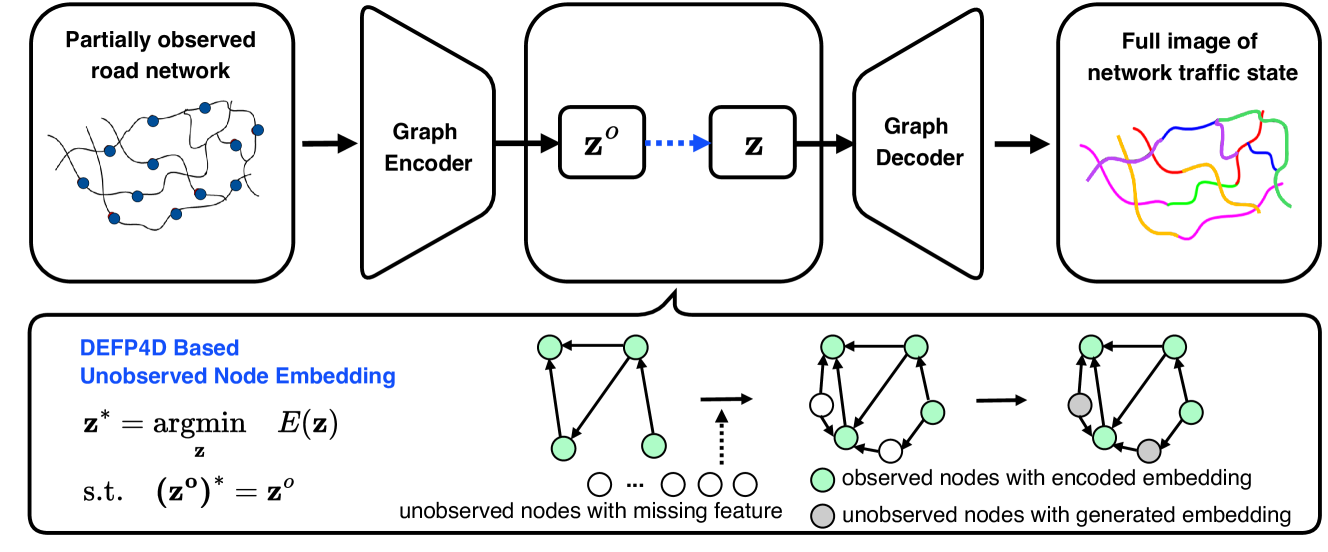
核心思路:论文的核心思路是设计一种能够有效利用稀疏传感器数据,并能准确建模交通网络拓扑结构和交通流动态特性的图自编码器模型。该模型通过引入有向图的狄利克雷能量最小化特征传播(DEFP4D)方法,增强空间表示学习,并采用物理引导的传播机制,分别处理拥堵和自由流模式,从而提高交通状态估计的准确性和鲁棒性。
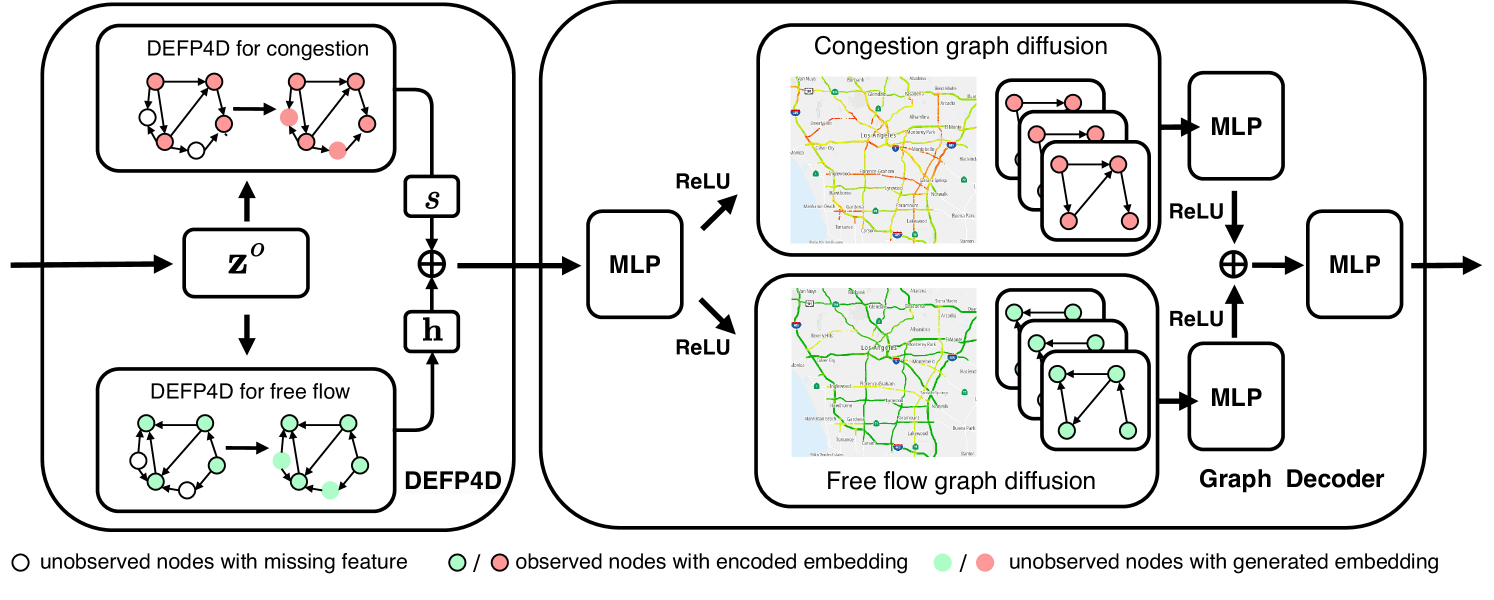
技术框架:DGAE模型主要包含三个核心模块:1) DEFP4D模块,用于在有向图上进行特征传播,解决无传感器路段的状态估计问题;2) DEFP4D引导的潜在空间编码模块,用于学习交通网络节点的低维表示,捕捉交通流的空间相关性;3) 物理引导的传播机制模块,用于根据交通流的模式(拥堵或自由流)选择不同的传播规则,提高模型对不同交通状况的适应性。整体流程是先利用DEFP4D进行初始特征传播,然后通过潜在空间编码学习节点表示,最后利用物理引导的传播机制进行交通状态估计。
关键创新:DGAE模型的主要创新点在于:1) 提出了DEFP4D方法,解决了DEFP方法无法处理有向图的问题,更符合实际交通网络的拓扑结构;2) 引入了DEFP4D引导的潜在空间编码,增强了模型对交通流空间相关性的学习能力;3) 设计了物理引导的传播机制,能够根据交通流的模式自适应地调整传播规则,提高了模型的鲁棒性。
关键设计:DEFP4D模块的关键在于定义了有向图上的狄利克雷能量,并推导了相应的特征传播公式。潜在空间编码模块采用了图自编码器的结构,损失函数包括重构损失和DEFP4D损失,用于约束节点表示的学习。物理引导的传播机制模块通过引入一个门控机制,根据交通流的密度选择不同的传播规则。具体的参数设置和网络结构细节在论文中有详细描述。
🖼️ 关键图片

📊 实验亮点
实验结果表明,DGAE模型在三个交通数据集上均优于现有的SOTA方法。尤其是在传感器数据极度稀疏的情况下,DEFP4D作为独立的轻量级解决方案,仍然表现出卓越的性能。DGAE还展现出强大的跨城市迁移能力,表明其具有良好的泛化性能。
🎯 应用场景
该研究成果可应用于城市智能交通管理系统,为交通拥堵预测、交通信号优化、路径规划等提供更准确的数据支持。通过提升交通状态估计的精度,可以有效缓解交通拥堵,提高交通效率,降低环境污染,并为自动驾驶等新兴技术提供更可靠的基础数据。
📄 摘要(原文)
Network-wide Traffic State Estimation (TSE), which aims to infer a complete image of network traffic states with sparsely deployed sensors, plays a vital role in intelligent transportation systems. With the development of data-driven methods, traffic dynamics modeling has advanced significantly. However, TSE poses fundamental challenges for data-driven approaches, since historical patterns cannot be learned locally at sensor-free segments. Although inductive graph learning shows promise in estimating states at locations without sensor, existing methods typically handle unobserved locations by filling them with zeros, introducing bias to the sensitive graph message propagation. The recently proposed Dirichlet Energy-based Feature Propagation (DEFP) method achieves State-Of-The-Art (SOTA) performance in unobserved node classification by eliminating the need for zero-filling. However, applying it to TSE faces three key challenges: inability to handle directed traffic networks, strong assumptions in traffic spatial correlation modeling, and overlooks distinct propagation rules of different patterns (e.g., congestion and free flow). We propose DGAE, a novel inductive graph representation model that addresses these challenges through theoretically derived DEFP for Directed graph (DEFP4D), enhanced spatial representation learning via DEFP4D-guided latent space encoding, and physics-guided propagation mechanisms that separately handles congested and free-flow patterns. Experiments on three traffic datasets demonstrate that DGAE outperforms existing SOTA methods and exhibits strong cross-city transferability. Furthermore, DEFP4D can serve as a standalone lightweight solution, showing superior performance under extremely sparse sensor conditions.