Learning Actionable World Models for Industrial Process Control
作者: Peng Yan, Ahmed Abdulkadir, Gerrit A. Schatte, Giulia Aguzzi, Joonsu Gha, Nikola Pascher, Matthias Rosenthal, Yunlong Gao, Benjamin F. Grewe, Thilo Stadelmann
分类: cs.LG, cs.AI, eess.SY
发布日期: 2025-03-03 (更新: 2025-04-25)
备注: Accepted by SDS 2025
💡 一句话要点
提出基于可操作世界模型的工业过程控制方法,解决数据有限下的精确控制问题
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 世界模型 工业过程控制 对比学习 数字孪生 塑料注射成型
📋 核心要点
- 现有工业过程控制方法在数据有限的情况下难以建立精确模型,无法有效预测和控制过程状态。
- 该论文提出一种基于世界模型的控制方法,通过对比学习解耦过程参数,实现对关键因素的精细控制。
- 实验表明,该方法在塑料注射成型中有效,能够提出具体的控制措施,具有实际应用价值。
📝 摘要(中文)
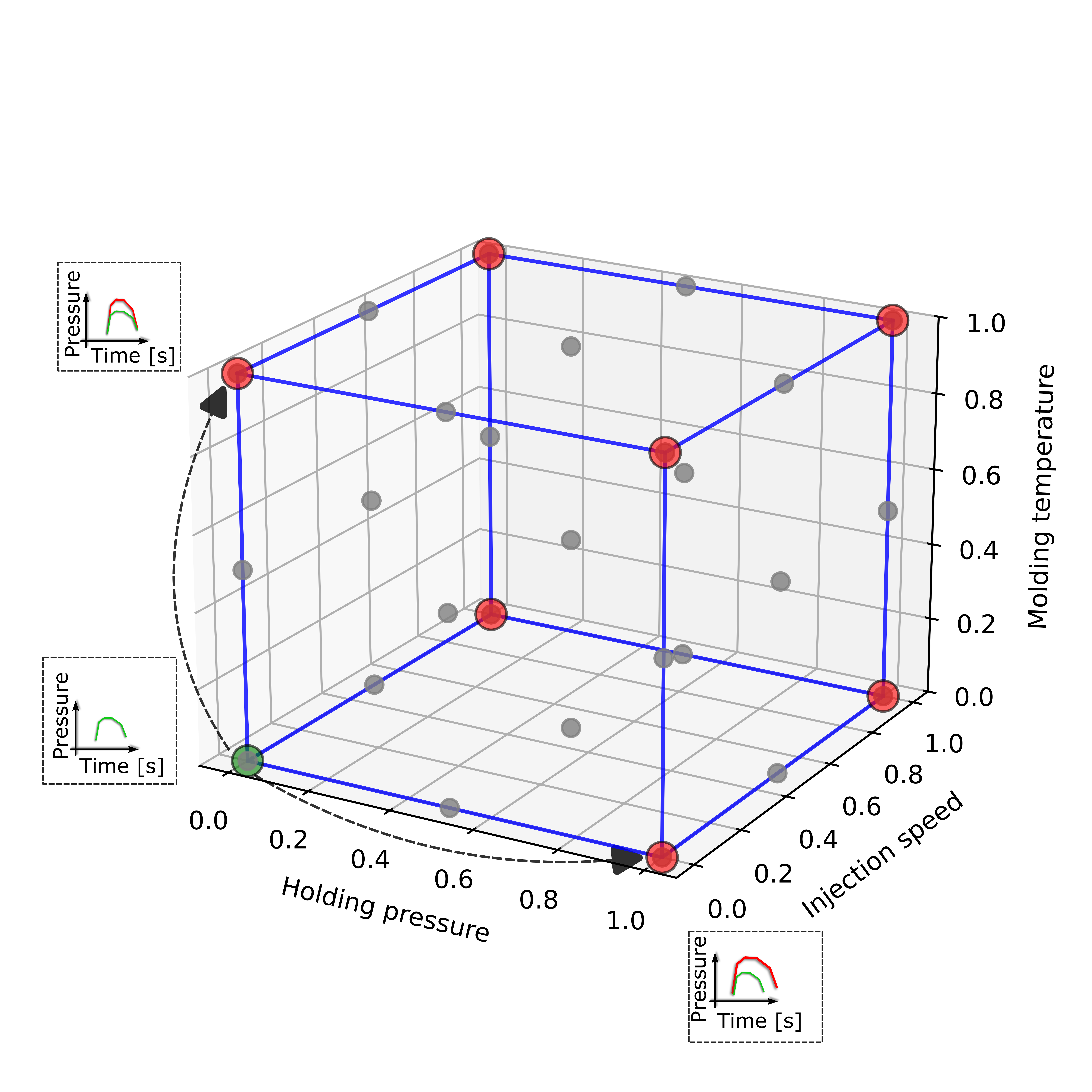
本文提出了一种新颖的方法,通过学习世界模型来实现从(被动)过程监控到主动过程控制的转变。该方法从非常有限的训练数据中学习复杂系统的行为,构建一个关于过程输入和输出的专用数字孪生模型,捕捉动作对过程世界的影响。通过在联合嵌入预测架构中使用对比学习,该模型能够解耦学习到的潜在表示中的过程参数,从而实现细粒度的控制。这种方法使得输入变化对表示变化的可预测,反之亦然,从而有助于解释导致过程变化的关键因素,为保持过程在操作范围内的有效控制措施铺平了道路。该方法在塑料注射成型案例中得到了验证,证明了其在为这种不稳定的过程提出具体控制措施方面的实际意义。
🔬 方法详解
问题定义:工业过程控制面临的挑战是在数据有限的情况下,难以建立能够准确预测过程状态并指导控制动作的模型。现有的方法可能无法有效地捕捉过程中的复杂关系,导致控制效果不佳,尤其是在过程不稳定或对参数变化敏感的情况下。
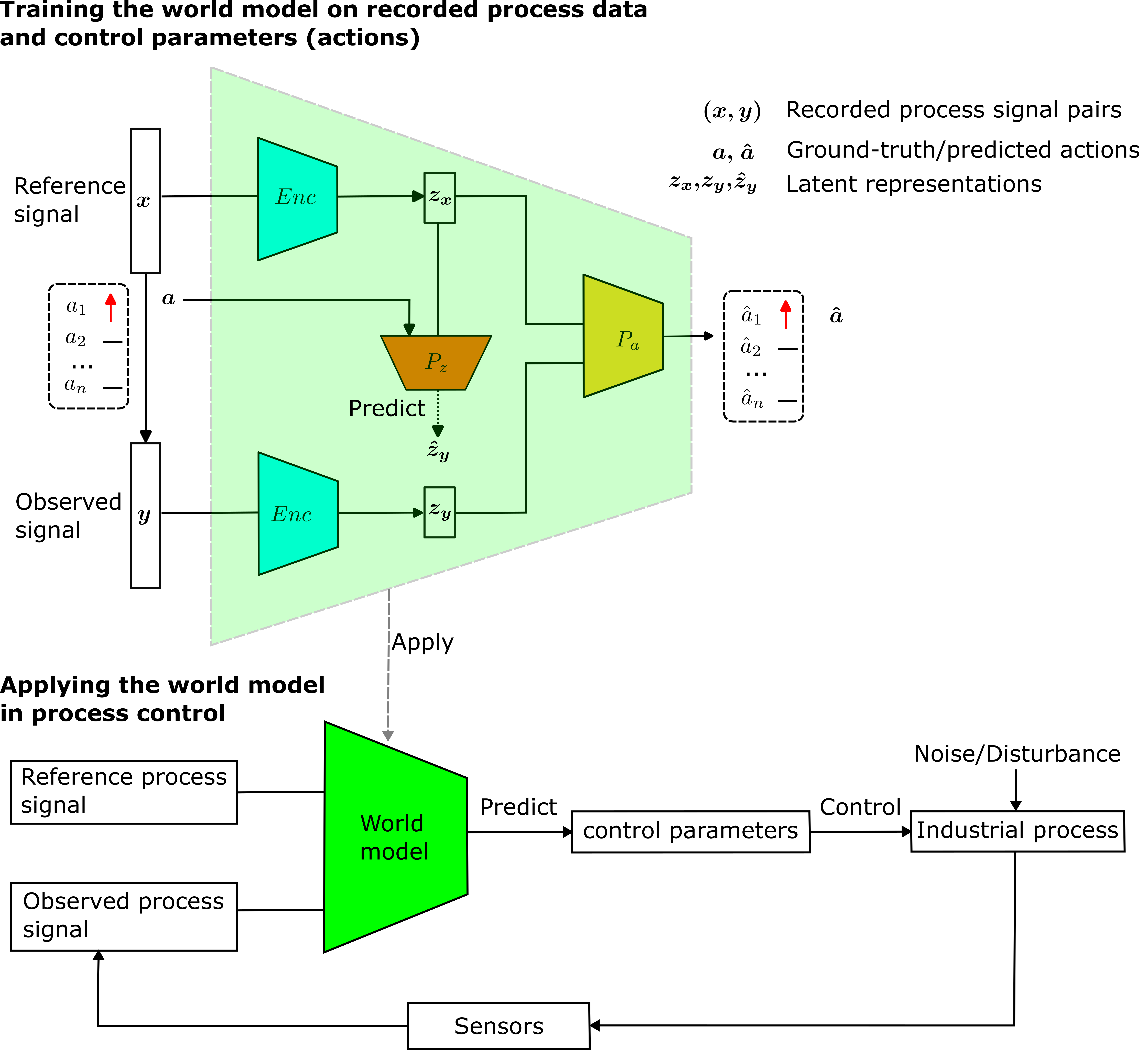
核心思路:论文的核心思路是学习一个可操作的世界模型,该模型能够从有限的数据中学习过程的动态特性,并解耦过程中的关键参数。通过对比学习,模型能够建立输入和输出之间的可预测关系,从而实现对过程的精细控制。这种方法旨在创建一个数字孪生模型,能够模拟过程行为并预测控制动作的影响。
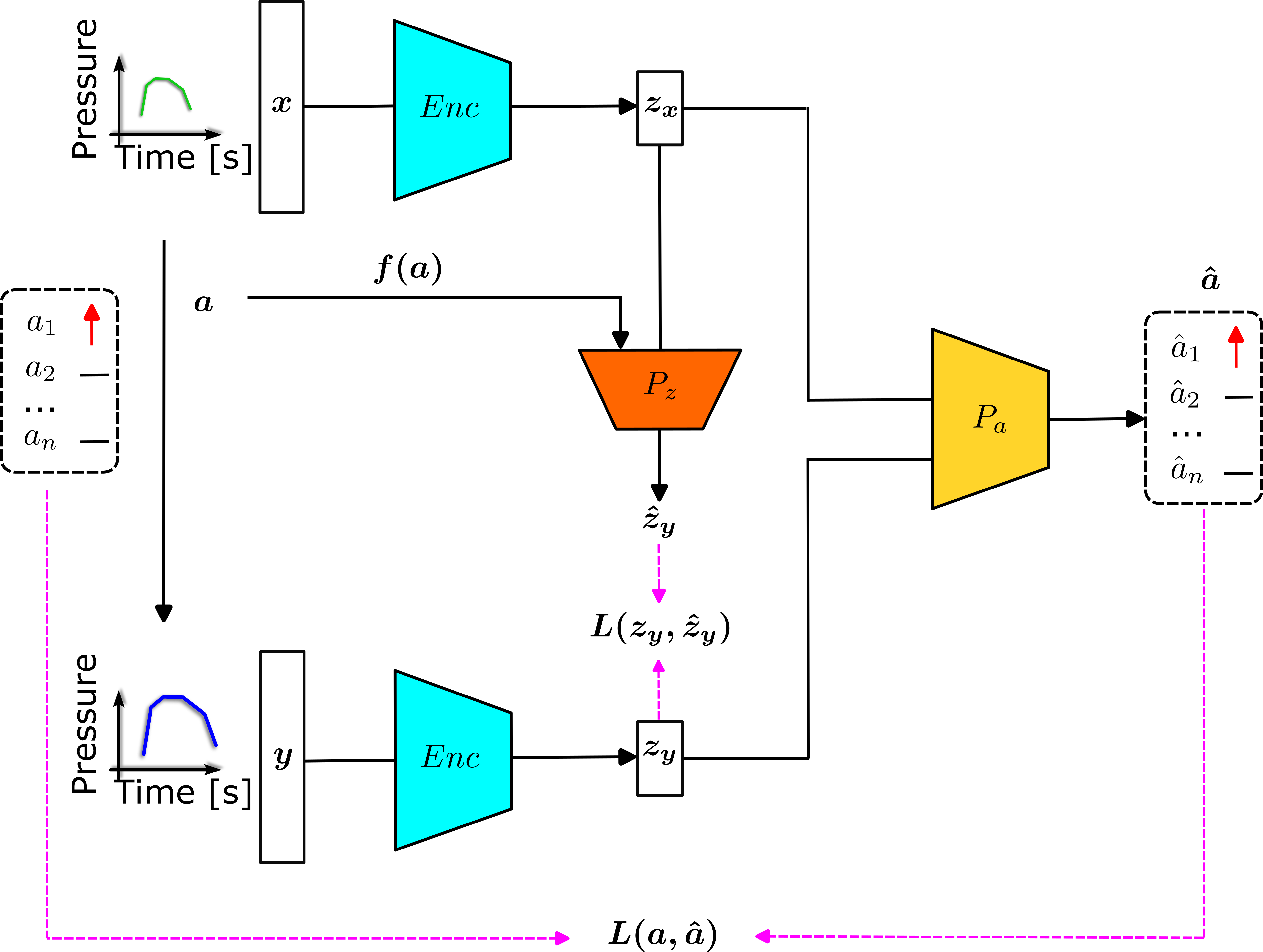
技术框架:该方法基于联合嵌入预测架构,包含以下主要模块:1) 数据收集与预处理:收集过程输入和输出数据,并进行必要的预处理。2) 潜在表示学习:使用对比学习方法,将过程参数解耦到学习到的潜在表示中。3) 预测模型构建:基于学习到的潜在表示,构建预测模型,预测过程状态的变化。4) 控制策略生成:基于预测模型,生成控制策略,以保持过程在操作范围内。
关键创新:该方法的关键创新在于将世界模型与对比学习相结合,以解耦过程参数并建立输入和输出之间的可预测关系。与传统的控制方法相比,该方法能够从有限的数据中学习过程的动态特性,并实现对过程的精细控制。此外,该方法还能够解释导致过程变化的关键因素,为控制策略的制定提供依据。
关键设计:对比学习损失函数用于鼓励模型学习解耦的潜在表示,使得相似的过程状态在潜在空间中更接近,而不同的状态则更远。预测模型的网络结构可能采用循环神经网络(RNN)或Transformer等,以捕捉过程的时序依赖关系。控制策略的生成可能基于模型预测控制(MPC)或强化学习等方法。
🖼️ 关键图片
📊 实验亮点
该论文在塑料注射成型案例中验证了所提出方法的有效性。实验结果表明,该方法能够学习到过程的关键参数,并提出具体的控制措施,有效地控制了注射成型过程,使其保持在操作范围内。具体的性能数据和对比基线(如传统PID控制)的提升幅度未知,但论文强调了该方法在实际应用中的可行性。
🎯 应用场景
该研究成果可广泛应用于各种工业过程控制领域,例如化工、制造、能源等。通过构建可操作的世界模型,可以实现对复杂工业过程的精确控制和优化,提高生产效率、降低成本、减少资源消耗,并提升产品质量。尤其适用于数据有限、过程动态性强的场景,具有重要的实际应用价值和推广前景。
📄 摘要(原文)
To go from (passive) process monitoring to active process control, an effective AI system must learn about the behavior of the complex system from very limited training data, forming an ad-hoc digital twin with respect to process inputs and outputs that captures the consequences of actions on the process's world. We propose a novel methodology based on learning world models that disentangles process parameters in the learned latent representation, allowing for fine-grained control. Representation learning is driven by the latent factors influencing the processes through contrastive learning within a joint embedding predictive architecture. This makes changes in representations predictable from changes in inputs and vice versa, facilitating interpretability of key factors responsible for process variations, paving the way for effective control actions to keep the process within operational bounds. The effectiveness of our method is validated on the example of plastic injection molding, demonstrating practical relevance in proposing specific control actions for a notoriously unstable process.