Linear Feedback Control Systems for Iterative Prompt Optimization in Large Language Models
作者: Rupesh Raj Karn
分类: cs.LG
发布日期: 2025-01-21
💡 一句话要点
提出基于线性反馈控制的LLM迭代提示优化方法,提升输出质量
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 大型语言模型 提示工程 反馈控制系统 迭代优化 线性控制理论
📋 核心要点
- 现有LLM需要迭代优化提示以获得期望输出,过程繁琐且缺乏系统性指导。
- 该论文将LLM提示优化过程类比为反馈控制系统,利用线性控制理论进行提示的迭代调整。
- 通过应用不同类型的控制器,该方法为LLM提示优化提供了一种新的数学框架。
📝 摘要(中文)
大型语言模型(LLM)通过基于给定提示生成输出来革新了各种应用。然而,获得期望的输出通常需要迭代的提示优化。本文提出了一种新颖的方法,该方法将LLM中迭代提示优化过程与反馈控制系统进行类比。我们通过将LLM输出与期望结果之间的偏差视为误差项来迭代地优化提示,直到满足输出标准。这个过程类似于一个反馈控制系统,其中LLM尽管是非线性且非确定性的,但可以使用线性反馈控制系统的原理进行管理。我们探索了在这种框架内应用不同类型的控制器,为将线性反馈控制机制与LLM集成提供了数学基础。
🔬 方法详解
问题定义:论文旨在解决大型语言模型(LLM)中,如何高效、系统地进行提示优化,以获得期望输出的问题。现有方法通常依赖人工经验或简单的启发式搜索,缺乏理论指导,效率低下,且难以保证收敛到最优提示。LLM的非线性和非确定性也增加了提示优化的难度。
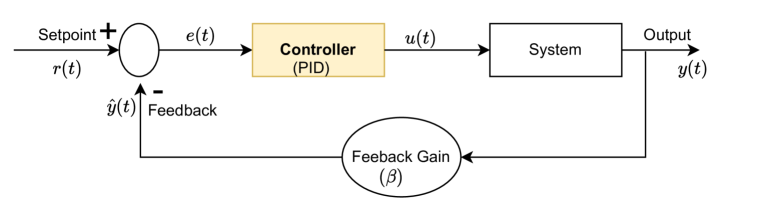
核心思路:论文的核心思路是将LLM的提示优化过程建模成一个反馈控制系统。将期望的LLM输出与实际输出之间的差异视为误差信号,利用线性反馈控制器的输出来调整提示,从而迭代地逼近最优提示。这种方法借鉴了控制理论的成熟框架,为LLM提示优化提供了一种系统化的解决方案。
技术框架:整体框架包含以下几个主要模块:1) LLM:作为被控对象,接收提示并生成输出。2) 误差计算模块:计算LLM输出与期望输出之间的误差。3) 控制器:根据误差信号,生成对提示的调整量。论文探索了不同类型的线性控制器,如比例(P)控制器、比例-积分(PI)控制器等。4) 提示更新模块:将控制器的输出应用到当前提示,生成新的提示,并将其输入到LLM中进行下一轮迭代。整个过程循环进行,直到误差满足预设的阈值。
关键创新:最重要的技术创新点在于将线性反馈控制理论应用于非线性、非确定的LLM提示优化问题。这是一种全新的视角,为LLM的控制和优化开辟了新的可能性。与传统的启发式方法相比,该方法具有更强的理论基础和更好的可控性。
关键设计:论文的关键设计包括:1) 误差函数的设计:需要根据具体的任务选择合适的误差函数,例如,可以使用余弦相似度来衡量LLM输出与期望输出之间的语义相似度。2) 控制器参数的整定:需要根据LLM的特性和任务需求,调整控制器的参数,以获得最佳的控制效果。论文可能探讨了不同的参数整定方法。3) 迭代停止条件:需要设置合适的迭代停止条件,以避免过度优化或陷入局部最优。
🖼️ 关键图片

📊 实验亮点
论文提出了基于线性反馈控制的LLM提示优化框架,并探索了不同类型控制器的应用。虽然具体实验数据未知,但该方法为LLM控制提供了一种新思路,有望在各种LLM应用中提升输出质量和可控性。未来的实验结果将进一步验证该方法的有效性和优越性。
🎯 应用场景
该研究成果可广泛应用于各种需要精确控制LLM输出的场景,例如:文本摘要、机器翻译、代码生成、对话系统等。通过该方法,可以更有效地引导LLM生成符合用户需求的、高质量的输出,提高LLM在实际应用中的价值。未来,该方法还可以扩展到多模态LLM,实现对图像、音频等多种模态信息的精确控制。
📄 摘要(原文)
Large Language Models (LLMs) have revolutionized various applications by generating outputs based on given prompts. However, achieving the desired output requires iterative prompt refinement. This paper presents a novel approach that draws parallels between the iterative prompt optimization process in LLMs and feedback control systems. We iteratively refine the prompt by treating the deviation between the LLM output and the desired result as an error term until the output criteria are met. This process is akin to a feedback control system, where the LLM, despite being non-linear and non-deterministic, is managed using principles from linear feedback control systems. We explore the application of different types of controllers within this framework, providing a mathematical foundation for integrating linear feedback control mechanisms with LLMs.