Dynami-CAL GraphNet: A Physics-Informed Graph Neural Network Conserving Linear and Angular Momentum for Dynamical Systems
作者: Vinay Sharma, Olga Fink
分类: cs.LG, cs.CE, physics.comp-ph
发布日期: 2025-01-13 (更新: 2025-09-23)
💡 一句话要点
Dynami-CAL GraphNet:一种用于动力学系统的、满足线性和角动量守恒的物理信息图神经网络
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 图神经网络 物理信息神经网络 动力学系统 动量守恒 多体系统
📋 核心要点
- 传统物理模型在多体动力学系统建模中面临计算量大的问题,而图神经网络等数据驱动方法缺乏物理一致性和可解释性。
- Dynami-CAL GraphNet通过在图神经网络中融入物理知识的归纳偏置,强制执行线性和角动量守恒,保证预测的物理合理性。
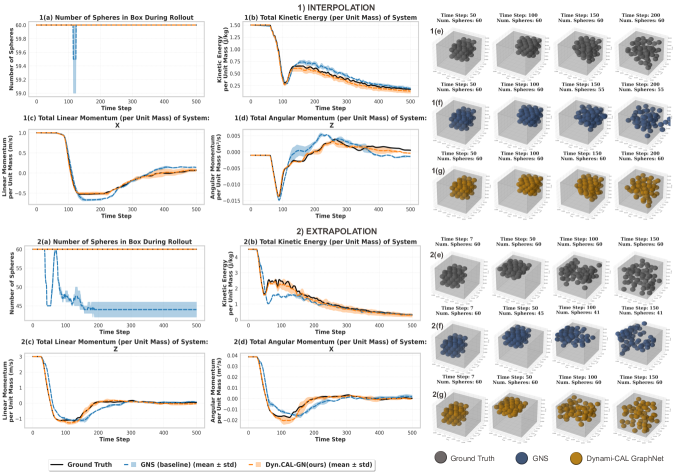
- 实验表明,该模型在3D颗粒系统中表现出稳定的误差累积、良好的外推能力以及对异构交互和外力的鲁棒性。
📝 摘要(中文)
本文提出了一种名为Dynami-CAL GraphNet的物理信息图神经网络,旨在解决多体动力学系统建模中传统物理模型计算量大和数据驱动方法缺乏物理一致性的问题。该网络结合了图神经网络的学习能力和物理知识的归纳偏置,通过在边局部参考系中强制执行相互作用节点之间的线性和角动量守恒来实现。这种设计保证了节点动力学预测的物理一致性,并提供了可解释的、由成对相互作用产生的边线性冲量和角冲量。在非弹性碰撞的3D颗粒系统上的评估表明,Dynami-CAL GraphNet在长时间的展开模拟中表现出稳定的误差累积,能够有效地外推到未见过的配置,并能稳健地处理异构相互作用和外力。Dynami-CAL GraphNet在需要精确、可解释和实时建模复杂多体动力学系统的领域(如机器人、航空航天工程和材料科学)具有显著优势。它通过提供符合基本守恒定律的物理一致且可扩展的预测,能够推断力和力矩,同时有效地处理异构相互作用和外力。
🔬 方法详解
问题定义:论文旨在解决多体动力学系统建模中,传统物理模型计算复杂度高,难以扩展,以及数据驱动的图神经网络方法缺乏物理一致性、可解释性和泛化能力的问题。现有方法难以在保证计算效率的同时,确保模型预测结果符合基本的物理定律,例如动量守恒。
核心思路:论文的核心思路是将物理知识融入到图神经网络的设计中,具体而言,通过在网络结构中强制执行线性和角动量守恒定律,来约束模型的学习过程。这种物理信息的融入使得模型在学习过程中能够更好地捕捉动力学系统的本质规律,从而提高模型的泛化能力和可解释性。
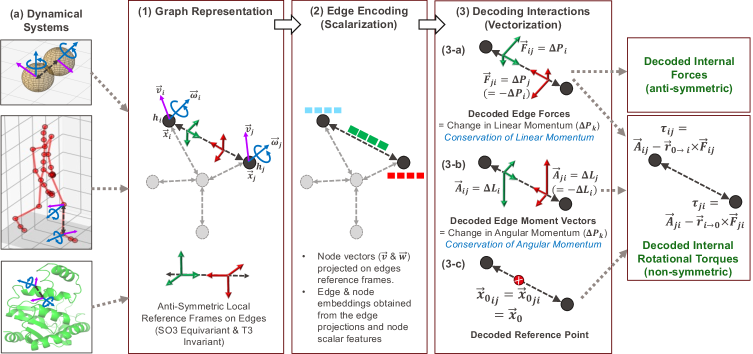
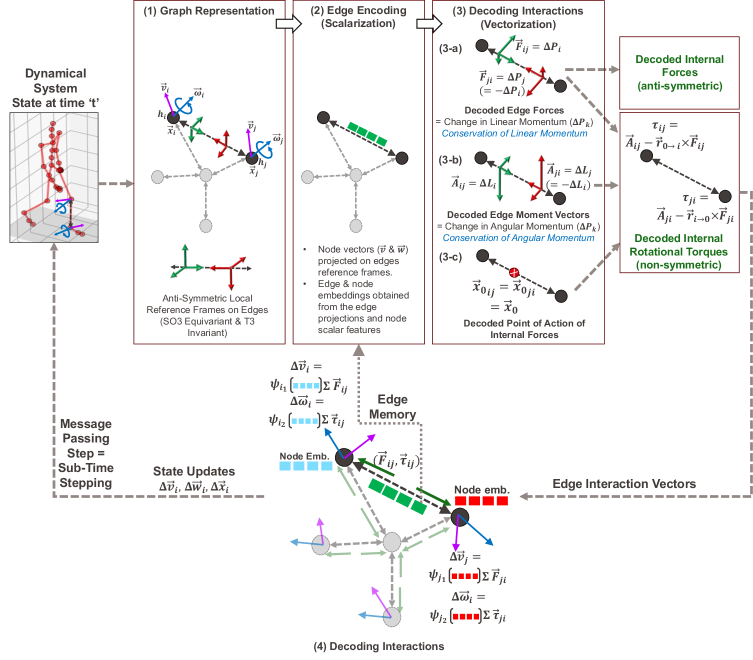
技术框架:Dynami-CAL GraphNet的整体架构基于图神经网络,其中节点表示系统中的各个物体,边表示物体之间的相互作用。网络的主要模块包括:节点特征编码器、边特征编码器、消息传递机制以及节点状态更新模块。关键在于,消息传递过程中,模型会计算并传递线性和角动量,并强制保证这些动量在相互作用的节点之间守恒。
关键创新:最重要的技术创新点在于,通过在边局部参考系中强制执行线性和角动量守恒,使得模型能够学习到具有物理意义的相互作用力。这种设计保证了模型的预测结果在物理上是合理的,并且可以解释为节点之间相互作用产生的线性和角冲量。此外,使用边局部参考系使得模型对旋转对称性具有等变性,对平移具有不变性,对节点排列具有等变性。
关键设计:Dynami-CAL GraphNet的关键设计包括:1) 使用边局部参考系来计算节点之间的相对位置和速度;2) 设计特定的消息传递函数,用于计算和传递线性和角动量;3) 使用损失函数来惩罚动量守恒的违反;4) 网络结构的选择,例如使用消息传递神经网络(MPNN)或图注意力网络(GAT)作为基础架构。具体的参数设置和网络结构的选择可能需要根据具体的应用场景进行调整。
🖼️ 关键图片
📊 实验亮点
Dynami-CAL GraphNet在3D颗粒系统上的实验结果表明,该模型在长时间的展开模拟中表现出稳定的误差累积,能够有效地外推到未见过的配置,并能稳健地处理异构相互作用和外力。具体而言,该模型在预测节点动力学方面的误差明显低于传统的图神经网络方法,并且能够准确地预测节点之间的相互作用力。
🎯 应用场景
Dynami-CAL GraphNet在机器人、航空航天工程和材料科学等领域具有广泛的应用前景。例如,在机器人领域,它可以用于预测多机器人系统的运动轨迹和相互作用力;在航空航天工程领域,它可以用于模拟飞行器的气动特性和结构动力学;在材料科学领域,它可以用于研究颗粒材料的力学行为。该研究的实际价值在于提供了一种高效、准确且具有物理可解释性的多体动力学系统建模方法,有助于解决相关领域的实际问题。
📄 摘要(原文)
Accurate, interpretable, and real-time modeling of multi-body dynamical systems is essential for predicting behaviors and inferring physical properties in natural and engineered environments. Traditional physics-based models face scalability challenges and are computationally demanding, while data-driven approaches like Graph Neural Networks (GNNs) often lack physical consistency, interpretability, and generalization. In this paper, we propose Dynami-CAL GraphNet, a Physics-Informed Graph Neural Network that integrates the learning capabilities of GNNs with physics-based inductive biases to address these limitations. Dynami-CAL GraphNet enforces pairwise conservation of linear and angular momentum for interacting nodes using edge-local reference frames that are equivariant to rotational symmetries, invariant to translations, and equivariant to node permutations. This design ensures physically consistent predictions of node dynamics while offering interpretable, edge-wise linear and angular impulses resulting from pairwise interactions. Evaluated on a 3D granular system with inelastic collisions, Dynami-CAL GraphNet demonstrates stable error accumulation over extended rollouts, effective extrapolations to unseen configurations, and robust handling of heterogeneous interactions and external forces. Dynami-CAL GraphNet offers significant advantages in fields requiring accurate, interpretable, and real-time modeling of complex multi-body dynamical systems, such as robotics, aerospace engineering, and materials science. By providing physically consistent and scalable predictions that adhere to fundamental conservation laws, it enables the inference of forces and moments while efficiently handling heterogeneous interactions and external forces.