Reinforcement Learning for Enhancing Sensing Estimation in Bistatic ISAC Systems with UAV Swarms
作者: Obed Morrison Atsu, Salmane Naoumi, Roberto Bomfin, Marwa Chafii
分类: eess.SP, cs.LG
发布日期: 2025-01-11
💡 一句话要点
提出基于多智能体强化学习的无人机群ISAC系统感知增强方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多智能体强化学习 无人机群 集成感知与通信 ISAC系统 轨迹优化
📋 核心要点
- 现有ISAC系统中,无人机群的部署和轨迹优化面临环境复杂、干扰严重等挑战,难以充分发挥感知性能。
- 论文提出基于MARL的无人机群协同感知方法,通过集中训练分散执行,优化无人机的位置和轨迹,提升感知性能。
- 实验结果表明,该方法在不同场景下均表现出良好的性能和适应性,为未来ISAC网络提供了一种可扩展的解决方案。
📝 摘要(中文)
本文提出了一种新颖的多智能体强化学习(MARL)框架,旨在利用无人机(UAV)集群作为感知雷达,增强集成感知与通信(ISAC)网络。通过将无人机的位置和轨迹优化建模为部分可观测马尔可夫决策过程(POMDP),我们开发了一种MARL方法,该方法利用集中式训练和分散式执行来最大化整体感知性能。具体而言,我们实施了一种分散式协作MARL策略,使无人机能够开发有效的通信协议,从而提高其环境感知能力和运营效率。此外,我们还采用了一种传输功率自适应技术来增强MARL解决方案,以减轻通信无人机之间的干扰并优化通信协议效率。尽管复杂性有所增加,但我们的解决方案在各种场景中都表现出强大的性能和适应性,为未来的ISAC网络提供了可扩展且经济高效的增强。
🔬 方法详解
问题定义:论文旨在解决在双基地ISAC系统中,如何利用无人机集群作为感知雷达,通过优化无人机的位置和轨迹,最大化整体感知性能的问题。现有方法通常难以在复杂环境中实现无人机间的有效协同,并且容易受到干扰,导致感知性能受限。
核心思路:论文的核心思路是将无人机群的定位和轨迹优化问题建模为部分可观测马尔可夫决策过程(POMDP),并采用多智能体强化学习(MARL)方法进行求解。通过集中式训练和分散式执行,使无人机能够学习到有效的协同策略,从而提高感知性能。同时,引入传输功率自适应技术,以减轻无人机间的干扰。
技术框架:整体框架包含以下几个主要模块:1) 环境建模:将ISAC系统中的无人机、目标和环境信息进行建模,构建POMDP;2) MARL训练:采用集中式训练的方式,训练无人机群的策略网络,使其能够学习到最优的协同策略;3) 分散式执行:在实际应用中,无人机根据训练好的策略网络,独立地做出决策,实现分散式执行;4) 传输功率自适应:根据无人机间的距离和干扰情况,动态调整无人机的传输功率,以减轻干扰。
关键创新:论文的关键创新在于将MARL应用于无人机群的ISAC系统感知增强问题,并提出了一种分散式协作MARL策略。与传统的单智能体强化学习方法相比,MARL能够更好地处理无人机间的协同问题,提高感知性能。此外,论文还引入了传输功率自适应技术,以减轻无人机间的干扰,进一步提升了系统的性能。
关键设计:论文采用Actor-Critic框架进行MARL训练,其中Actor网络用于学习无人机的策略,Critic网络用于评估无人机策略的价值。损失函数包括策略梯度损失和值函数损失。网络结构采用多层感知机(MLP)。传输功率自适应采用基于距离和干扰的动态调整策略。具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
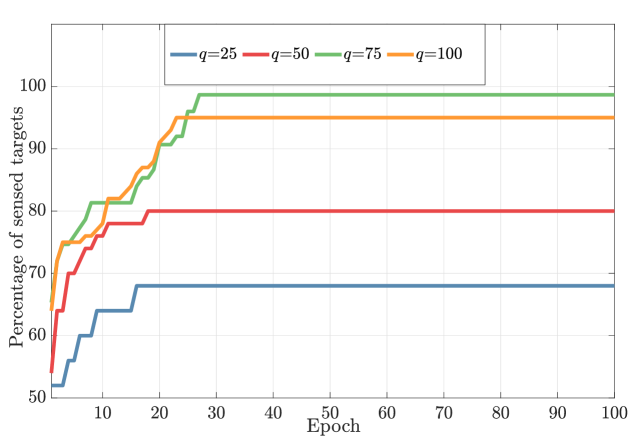
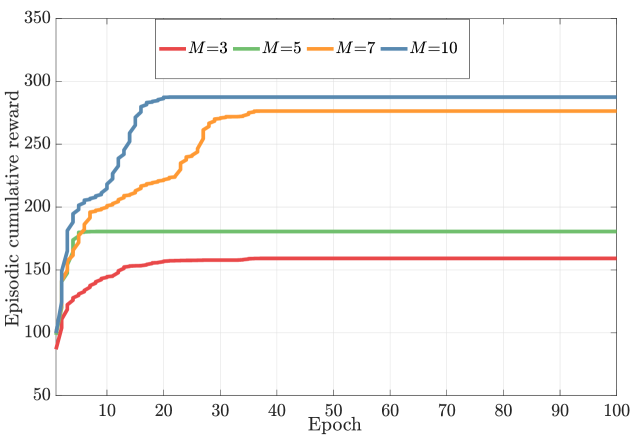
论文通过仿真实验验证了所提出方法的有效性。结果表明,与传统的单智能体强化学习方法相比,该方法能够显著提高感知性能。具体提升幅度未知。此外,实验还表明,该方法在不同场景下均表现出良好的适应性,能够有效地应对环境变化和干扰。
🎯 应用场景
该研究成果可应用于各种需要高精度感知和可靠通信的场景,例如:灾害救援、环境监测、智能交通等。通过优化无人机群的部署和轨迹,可以提高感知范围和精度,为决策提供更准确的信息。此外,该方法还可以应用于军事侦察和监视等领域,具有重要的实际价值和战略意义。未来,该技术有望与5G/6G等通信技术相结合,实现更高效的集成感知与通信。
📄 摘要(原文)
This paper introduces a novel Multi-Agent Reinforcement Learning (MARL) framework to enhance integrated sensing and communication (ISAC) networks using unmanned aerial vehicle (UAV) swarms as sensing radars. By framing the positioning and trajectory optimization of UAVs as a Partially Observable Markov Decision Process, we develop a MARL approach that leverages centralized training with decentralized execution to maximize the overall sensing performance. Specifically, we implement a decentralized cooperative MARL strategy to enable UAVs to develop effective communication protocols, therefore enhancing their environmental awareness and operational efficiency. Additionally, we augment the MARL solution with a transmission power adaptation technique to mitigate interference between the communicating drones and optimize the communication protocol efficiency. Moreover, a transmission power adaptation technique is incorporated to mitigate interference and optimize the learned communication protocol efficiency. Despite the increased complexity, our solution demonstrates robust performance and adaptability across various scenarios, providing a scalable and cost-effective enhancement for future ISAC networks.