Graph Structure Learning for Spatial-Temporal Imputation: Adapting to Node and Feature Scales
作者: Xinyu Yang, Yu Sun, Xinyang Chen, Ying Zhang, Xiaojie Yuan
分类: cs.LG, cs.DB
发布日期: 2024-12-24 (更新: 2025-01-05)
备注: This paper has been accepted as a full paper at AAAI 2025
💡 一句话要点
提出多尺度图结构学习框架GSLI,用于解决时空数据填补中异构空间关系建模问题
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting)
关键词: 时空数据填补 图结构学习 多尺度学习 空间相关性 时间依赖性
📋 核心要点
- 现有时空数据填补方法依赖固定空间图,忽略了不同特征在不同位置的异构空间关系。
- GSLI框架通过节点尺度和特征尺度图结构学习,动态适应异构空间相关性,并结合显著性建模。
- 在六个真实数据集上,GSLI展现了在时空数据填补方面的性能提升。
📝 摘要(中文)
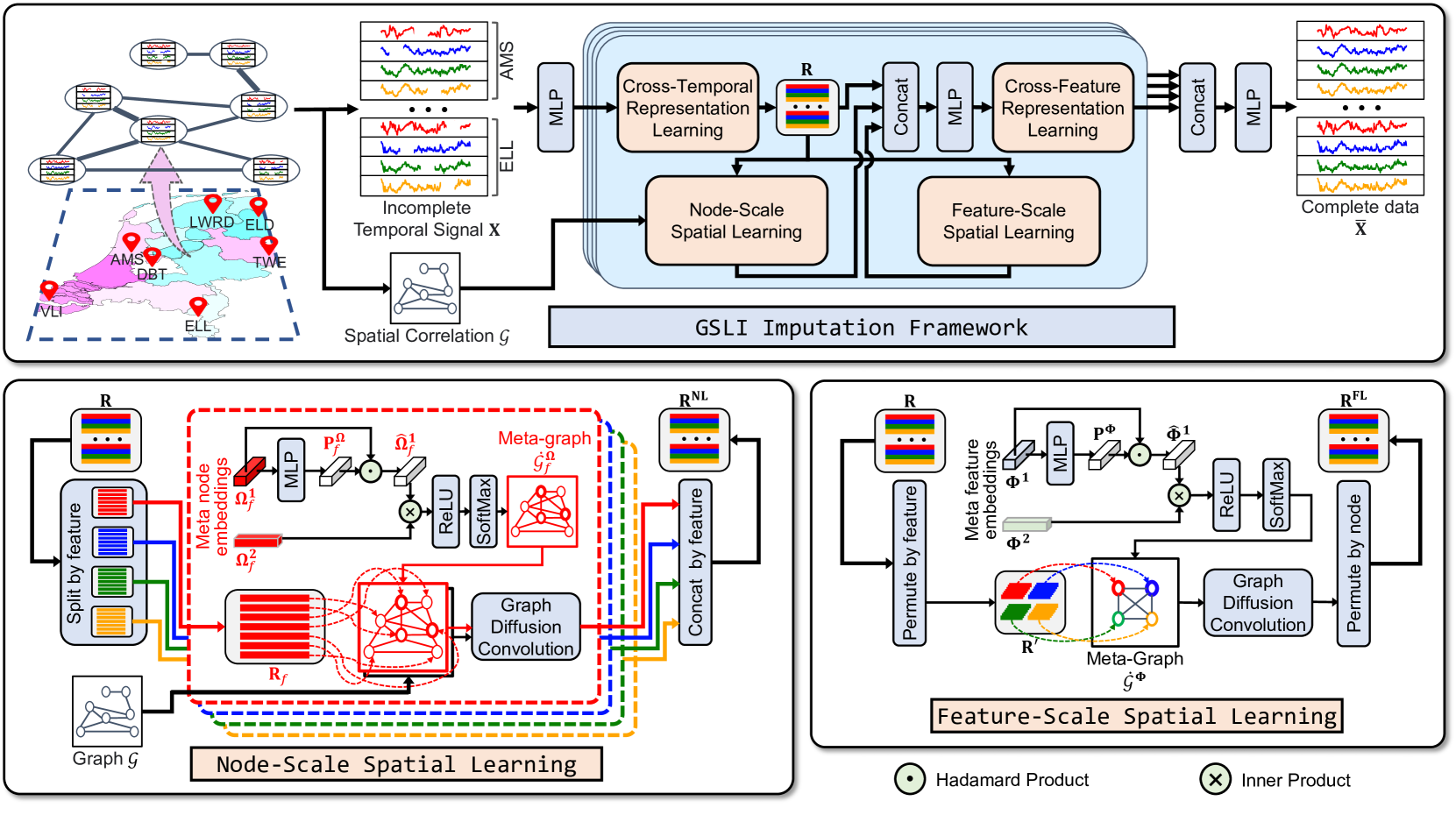
针对不同地理位置采集的时空数据常存在缺失值的问题,本文提出了一种多尺度图结构学习框架GSLI,用于时空数据填补。现有方法主要依赖固定的空间图进行填补,隐式地假设所有特征在不同位置的空间关系大致相同。然而,它们可能忽略了不同位置传感器记录的不同特征的空间关系差异。GSLI框架动态地适应异构空间相关性,包含节点尺度图结构学习以适应不同特征的全局空间相关性,以及特征尺度图结构学习以揭示所有站点内特征的共同空间相关性。结合显著性建模,该框架强调在填补过程中更重要的节点和特征。此外,GSLI还结合了跨特征和跨时间表示学习,以捕获时空依赖关系。在六个真实的不完整时空数据集上的评估表明,GSLI在数据填补方面有所改进。
🔬 方法详解
问题定义:时空数据填补旨在恢复缺失的时空数据值。现有方法主要依赖预定义的固定空间图,例如基于距离或邻接关系的图。这些方法假设所有特征在不同位置具有相似的空间关系,忽略了实际中不同特征可能具有不同的空间依赖性,从而限制了填补的准确性。此外,现有方法可能没有充分利用特征之间的相关性和时间依赖性。
核心思路:GSLI的核心思路是学习适应于不同特征和不同位置的多尺度图结构,从而更准确地捕捉时空数据的空间依赖性。通过节点尺度图结构学习,为每个特征学习一个全局空间图,捕捉不同特征之间的空间相关性。通过特征尺度图结构学习,学习所有站点内特征的共同空间相关性。同时,结合显著性建模,突出重要节点和特征,并利用跨特征和跨时间表示学习,捕捉时空依赖关系。
技术框架:GSLI框架主要包含以下几个模块:1) 节点尺度图结构学习:为每个特征学习一个全局空间图,捕捉不同特征之间的空间相关性。2) 特征尺度图结构学习:学习所有站点内特征的共同空间相关性。3) 显著性建模:根据节点和特征的重要性,赋予不同的权重。4) 跨特征表示学习:学习特征之间的相关性表示。5) 跨时间表示学习:学习时间序列的依赖关系表示。6) 填补模块:基于学习到的图结构和表示,利用图神经网络进行数据填补。
关键创新:GSLI的关键创新在于提出了多尺度图结构学习方法,能够动态地适应不同特征和不同位置的异构空间相关性。与现有方法相比,GSLI不再依赖于预定义的固定空间图,而是通过学习的方式获得更准确的空间关系表示。此外,GSLI还结合了显著性建模和跨特征/时间表示学习,进一步提升了填补的准确性。
关键设计:节点尺度图结构学习和特征尺度图结构学习的具体实现方式未知,论文中可能使用了可学习的相似度度量函数来构建图的邻接矩阵。显著性建模可能使用了注意力机制,根据节点和特征的贡献程度赋予不同的权重。跨特征和跨时间表示学习可能使用了循环神经网络(RNN)或Transformer等模型来捕捉时序依赖关系。损失函数的设计可能包括填补误差、图结构学习的正则化项以及显著性权重的约束项。
🖼️ 关键图片


📊 实验亮点
论文在六个真实时空数据集上进行了实验,结果表明GSLI在数据填补方面优于现有方法。具体的性能提升幅度未知,但摘要中明确指出GSLI展现了改进,说明该方法在实际应用中具有一定的优势。具体的对比基线和性能指标需要在论文中进一步查看。
🎯 应用场景
GSLI可应用于各种时空数据填补场景,例如环境监测数据恢复、交通流量预测、智慧城市数据管理等。通过更准确地填补缺失数据,可以提高数据分析的可靠性和有效性,为决策提供更准确的依据。该研究对于提升时空数据分析能力,促进相关领域的智能化发展具有重要意义。
📄 摘要(原文)
Spatial-temporal data collected across different geographic locations often suffer from missing values, posing challenges to data analysis. Existing methods primarily leverage fixed spatial graphs to impute missing values, which implicitly assume that the spatial relationship is roughly the same for all features across different locations. However, they may overlook the different spatial relationships of diverse features recorded by sensors in different locations. To address this, we introduce the multi-scale Graph Structure Learning framework for spatial-temporal Imputation (GSLI) that dynamically adapts to the heterogeneous spatial correlations. Our framework encompasses node-scale graph structure learning to cater to the distinct global spatial correlations of different features, and feature-scale graph structure learning to unveil common spatial correlation across features within all stations. Integrated with prominence modeling, our framework emphasizes nodes and features with greater significance in the imputation process. Furthermore, GSLI incorporates cross-feature and cross-temporal representation learning to capture spatial-temporal dependencies. Evaluated on six real incomplete spatial-temporal datasets, GSLI showcases the improvement in data imputation.