A Universal Model for Human Mobility Prediction
作者: Qingyue Long, Yuan Yuan, Yong Li
分类: cs.LG, cs.AI
发布日期: 2024-12-19
💡 一句话要点
提出UniMob,一个通用的人类移动预测模型,可同时处理个体轨迹和群体流量预测。
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 人类移动预测 轨迹预测 流量预测 多模态学习 Transformer 扩散模型 时空建模
📋 核心要点
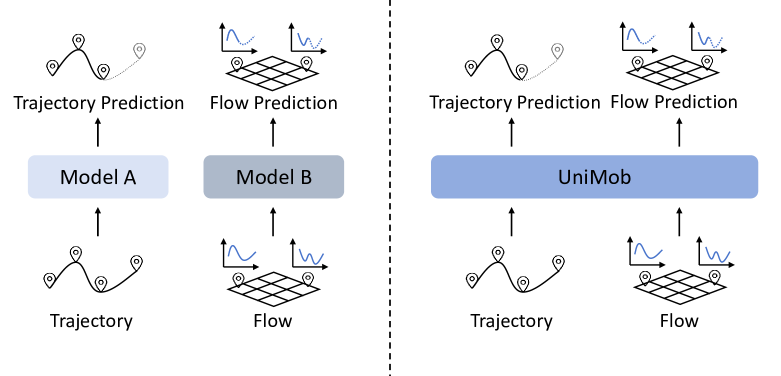
- 现有移动预测方法受限于个体轨迹和群体流量的模态差异,难以实现统一建模。
- UniMob通过多视角分词器和扩散Transformer,将轨迹和流量数据统一为时空token进行序列建模。
- 双向个体和群体对齐机制学习共同时空模式,在噪声和稀疏数据下,UniMob性能提升显著。
📝 摘要(中文)
人类移动预测对于城市规划、交通控制和应急响应至关重要。移动行为可分为个体和群体,并由个体轨迹和群体流量等不同的移动数据记录。个体轨迹和群体流量作为不同的数据模态,具有紧密的耦合关系:群体流量源于个体轨迹的自下而上聚合,而群体流量的约束又塑造个体轨迹。现有的移动预测方法由于个体轨迹和群体流量之间的模态差距而局限于单一任务。本文旨在统一移动预测,以突破特定任务模型的局限性。我们提出了一个通用的人类移动预测模型(UniMob),它可以应用于个体轨迹和群体流量。UniMob利用多视角移动分词器将轨迹和流量数据转换为时空token,通过扩散Transformer架构实现统一的序列建模。为了弥合这两种数据模态不同特征之间的差距,我们实现了一种新颖的双向个体和群体对齐机制。该机制能够从不同的移动数据中学习共同的时空模式,促进轨迹和流量预测的相互增强。在真实世界数据集上的大量实验验证了我们的模型在轨迹和流量预测方面优于最先进的基线模型。尤其是在噪声和稀疏数据场景中,我们的模型在MAPE和Accuracy@5指标上取得了超过14%和25%的最高性能提升。
🔬 方法详解
问题定义:现有的人类移动预测方法通常针对个体轨迹或群体流量进行单独建模,忽略了两者之间的内在联系。个体轨迹和群体流量是人类移动行为的两种不同表现形式,它们之间存在着相互影响、相互制约的关系。现有的方法无法充分利用这种关系,导致模型泛化能力受限,尤其是在数据稀疏或噪声较多的情况下,预测精度会显著下降。
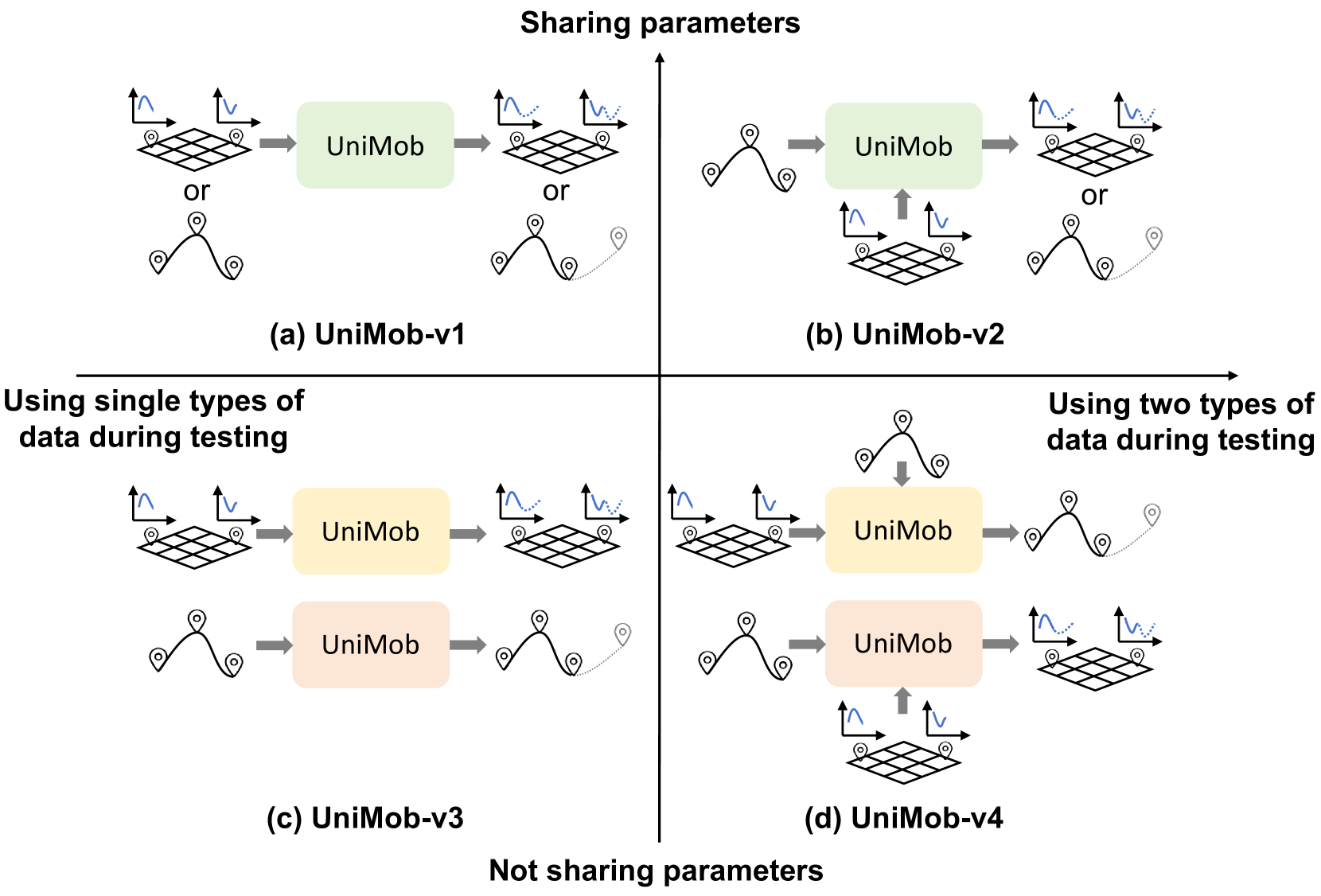
核心思路:UniMob的核心思路是将个体轨迹和群体流量统一到一个模型中进行学习,从而充分利用两种数据模态之间的互补信息。通过学习共同的时空模式,模型可以更好地理解人类移动行为的本质,从而提高预测精度和泛化能力。模型设计了一个双向对齐机制,使得个体轨迹和群体流量可以相互增强,从而提高预测性能。
技术框架:UniMob的整体架构包含三个主要模块:多视角移动分词器、扩散Transformer编码器和双向个体-群体对齐模块。首先,多视角移动分词器将个体轨迹和群体流量数据转换为时空token序列。然后,扩散Transformer编码器对token序列进行编码,学习时空依赖关系。最后,双向个体-群体对齐模块用于对齐个体轨迹和群体流量的表示,从而实现相互增强。
关键创新:UniMob的关键创新在于以下两点:一是提出了多视角移动分词器,能够将不同模态的移动数据转换为统一的token表示;二是设计了双向个体-群体对齐机制,能够学习个体轨迹和群体流量之间的共同时空模式,实现相互增强。与现有方法相比,UniMob能够更好地利用不同模态的移动数据,从而提高预测精度和泛化能力。
关键设计:多视角移动分词器使用不同的分词策略来处理个体轨迹和群体流量数据。对于个体轨迹,采用基于网格的分词方法,将轨迹点映射到网格单元中。对于群体流量,采用基于区域的分词方法,将流量数据映射到不同的区域中。双向个体-群体对齐模块使用注意力机制来对齐个体轨迹和群体流量的表示。损失函数包括轨迹预测损失、流量预测损失和对齐损失。扩散Transformer的具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
UniMob在真实数据集上取得了显著的性能提升。在噪声和稀疏数据场景下,UniMob在MAPE指标上取得了超过14%的提升,在Accuracy@5指标上取得了超过25%的提升。这些结果表明,UniMob能够有效地利用不同模态的移动数据,提高预测精度和鲁棒性,尤其是在数据质量较差的情况下。
🎯 应用场景
UniMob的应用场景广泛,包括城市规划、交通管理、应急响应、位置推荐等。通过准确预测人类移动行为,可以优化城市资源配置,提高交通效率,辅助应急决策,并为用户提供个性化的位置服务。该研究的成果有助于构建更智能、更高效的城市管理系统。
📄 摘要(原文)
Predicting human mobility is crucial for urban planning, traffic control, and emergency response. Mobility behaviors can be categorized into individual and collective, and these behaviors are recorded by diverse mobility data, such as individual trajectory and crowd flow. As different modalities of mobility data, individual trajectory and crowd flow have a close coupling relationship. Crowd flows originate from the bottom-up aggregation of individual trajectories, while the constraints imposed by crowd flows shape these individual trajectories. Existing mobility prediction methods are limited to single tasks due to modal gaps between individual trajectory and crowd flow. In this work, we aim to unify mobility prediction to break through the limitations of task-specific models. We propose a universal human mobility prediction model (named UniMob), which can be applied to both individual trajectory and crowd flow. UniMob leverages a multi-view mobility tokenizer that transforms both trajectory and flow data into spatiotemporal tokens, facilitating unified sequential modeling through a diffusion transformer architecture. To bridge the gap between the different characteristics of these two data modalities, we implement a novel bidirectional individual and collective alignment mechanism. This mechanism enables learning common spatiotemporal patterns from different mobility data, facilitating mutual enhancement of both trajectory and flow predictions. Extensive experiments on real-world datasets validate the superiority of our model over state-of-the-art baselines in trajectory and flow prediction. Especially in noisy and scarce data scenarios, our model achieves the highest performance improvement of more than 14% and 25% in MAPE and Accuracy@5.