Learning Physics Informed Neural ODEs With Partial Measurements
作者: Paul Ghanem, Ahmet Demirkaya, Tales Imbiriba, Alireza Ramezani, Zachary Danziger, Deniz Erdogmus
分类: cs.LG, cs.AI
发布日期: 2024-12-11
💡 一句话要点
提出基于物理信息神经ODE的部分测量动态系统学习框架
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 物理信息神经ODE 部分测量 动态系统 状态估计 序列优化
📋 核心要点
- 现有方法难以在部分状态未测量且动力学未知的情况下学习物理系统的动态特性。
- 提出一种序列优化框架,结合状态估计理论和物理信息神经ODE,学习未测量过程的动力学。
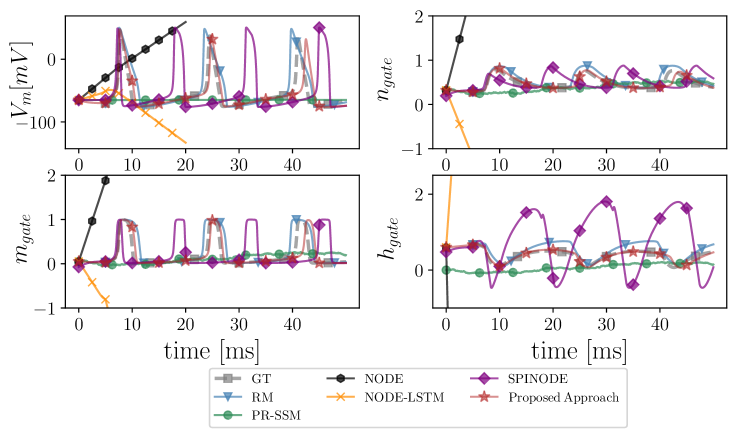
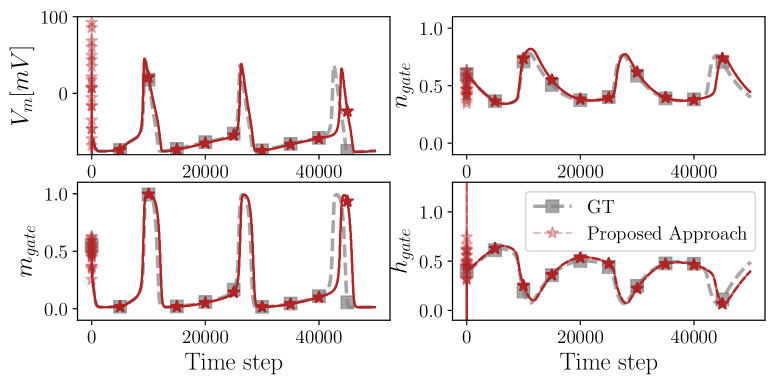
- 通过数值模拟和真实数据集验证,结果表明该方法优于现有基线方法,能有效学习系统动态。
📝 摘要(中文)
本文研究了在状态部分可测的情况下,学习物理和时空过程的动态特性这一难题,尤其关注系统部分状态未被测量,且生成这些未测量状态的动力学未知的情况。受状态估计理论和物理信息神经ODE的启发,我们提出了一个序列优化框架,用于学习控制未测量过程的动力学。我们通过数值模拟和一个来自机电定位系统的真实数据集验证了所提出方法的性能。结果表明,底层方程可以很好地融入我们的形式体系中,并且与基线方法相比,所提出方法具有显著的性能提升。
🔬 方法详解
问题定义:论文旨在解决部分可观测物理系统动力学建模问题,尤其是在部分状态变量无法直接测量,且控制这些未测量状态变量的动力学方程未知的情况下。现有方法在处理此类问题时,难以准确学习系统的整体动态特性,导致预测精度下降。
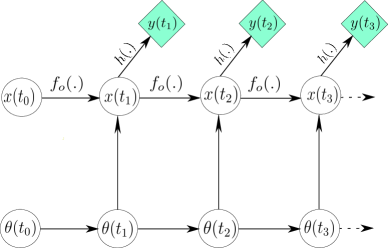
核心思路:论文的核心思路是将状态估计理论与物理信息神经常微分方程(Physics Informed Neural ODEs, PINODEs)相结合。通过PINODEs学习系统的整体动态,并利用可观测状态的信息来约束和优化未观测状态的动力学模型。这种方法能够有效地利用已知的物理信息和观测数据,从而提高模型对系统动态的预测能力。
技术框架:该方法采用序列优化框架。首先,利用可观测数据初始化系统的状态。然后,使用PINODEs学习系统的动态方程,包括已知和未知的动力学部分。在学习过程中,利用可观测状态的测量值作为约束,优化PINODEs的参数,从而提高模型对未观测状态的预测精度。整个框架可以迭代进行,不断优化状态估计和动力学模型。
关键创新:该方法最重要的创新点在于将状态估计理论与PINODEs相结合,从而能够在部分观测的情况下学习系统的动态特性。与传统的PINODEs方法相比,该方法能够更好地处理未观测状态的动力学建模问题,并提高模型的预测精度。
关键设计:在具体实现上,论文可能采用了以下关键设计: 1. 使用神经网络来表示未观测状态的动力学方程。 2. 设计合适的损失函数,包括数据拟合项(用于约束可观测状态的预测)和物理信息项(用于约束动态方程的合理性)。 3. 采用合适的优化算法,如Adam或L-BFGS,来训练神经网络。 4. 针对具体问题,可能需要调整网络结构和损失函数的权重,以获得最佳的性能。
🖼️ 关键图片
📊 实验亮点
论文通过数值模拟和真实数据集验证了所提出方法的有效性。在机电定位系统的实验中,该方法能够准确地学习系统的动态特性,并显著提高对未观测状态的预测精度。与基线方法相比,该方法在预测误差方面取得了显著的降低,证明了其优越性。
🎯 应用场景
该研究成果可应用于各种需要进行状态估计和动态建模的领域,例如机器人控制、电力系统监控、生物系统建模和气候预测等。通过学习系统的动态特性,可以实现对系统行为的预测和控制,从而提高系统的性能和可靠性。此外,该方法还可以用于故障诊断和异常检测,及时发现系统中的潜在问题。
📄 摘要(原文)
Learning dynamics governing physical and spatiotemporal processes is a challenging problem, especially in scenarios where states are partially measured. In this work, we tackle the problem of learning dynamics governing these systems when parts of the system's states are not measured, specifically when the dynamics generating the non-measured states are unknown. Inspired by state estimation theory and Physics Informed Neural ODEs, we present a sequential optimization framework in which dynamics governing unmeasured processes can be learned. We demonstrate the performance of the proposed approach leveraging numerical simulations and a real dataset extracted from an electro-mechanical positioning system. We show how the underlying equations fit into our formalism and demonstrate the improved performance of the proposed method when compared with baselines.