Incremental Learning of Affordances using Markov Logic Networks
作者: George Potter, Gertjan Burghouts, Joris Sijs
分类: cs.LG, cs.RO
发布日期: 2024-10-23
备注: accepted at IEEE IRC 2024
期刊: IEEE IRC 2024
💡 一句话要点
提出MLN-CLA算法,用于机器人环境中物体可供性的增量学习与零样本推理。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 可供性 增量学习 马尔可夫逻辑网络 机器人 零样本学习
📋 核心要点
- 现有方法难以在机器人环境中有效捕获物体可供性,尤其是在上下文信息依赖方面。
- 论文提出MLN-CLA算法,通过保留和更新知识,实现MLN的增量学习,避免从头训练。
- 实验结果表明,MLN-CLA在累积学习和零样本可供性推理方面优于现有基线方法。
📝 摘要(中文)
可供性使机器人能够对其周围环境进行语义理解,从而在完成给定任务时具有更大的行动灵活性。在机器学习模型中捕获对象的可供性是一项艰巨的任务,因为它们依赖于上下文信息。马尔可夫逻辑网络(MLN)将概率推理与逻辑相结合,能够捕获这种上下文。移动机器人在部分已知的环境中运行,在这些环境中可以观察到未见过的对象可供性。这些新信息必须被纳入到现有的知识中,而无需从头开始重新训练MLN。我们介绍了MLN累积学习算法(MLN-CLA)。MLN-CLA通过保留知识并仅更新已更改的知识来学习各个知识领域中的新关系,为此MLN会重新训练。我们表明,MLN-CLA对于累积学习和零样本可供性推理是有效的,优于强大的基线。
🔬 方法详解
问题定义:论文旨在解决移动机器人在部分已知环境中,如何增量学习物体可供性的问题。现有方法在面对新环境和新物体时,需要从头训练模型,计算成本高昂,且无法有效利用已有的知识。此外,可供性依赖于上下文信息,如何有效建模这种依赖关系也是一个挑战。
核心思路:论文的核心思路是利用马尔可夫逻辑网络(MLN)来建模可供性,并设计一种累积学习算法(MLN-CLA),使其能够在已有知识的基础上,仅更新发生变化的知识,从而实现增量学习。通过保留和更新知识,避免了从头训练的需要,提高了学习效率。
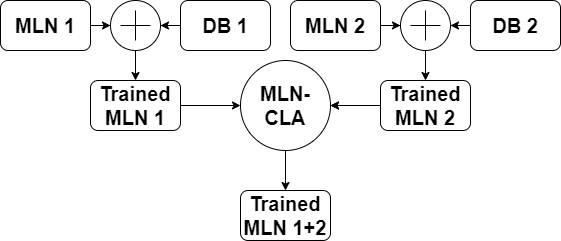
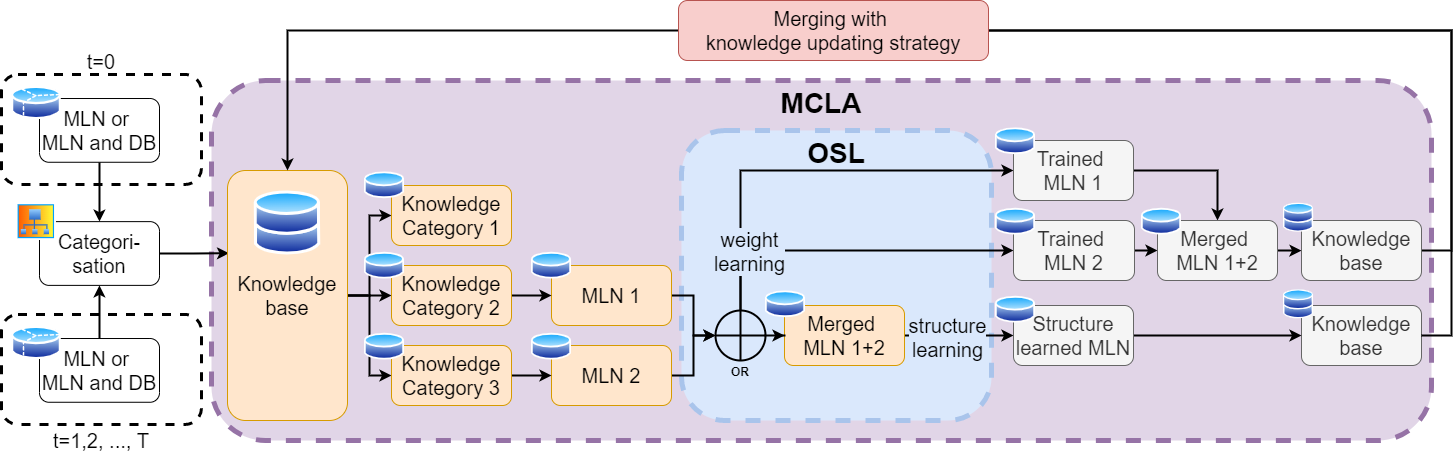
技术框架:MLN-CLA算法的整体框架如下:1. 使用MLN表示可供性知识,包括物体、动作和环境之间的关系。2. 当观察到新的物体或环境时,识别需要更新的知识。3. 仅对需要更新的知识进行重新训练,而保留其他知识不变。4. 将更新后的知识集成到现有的MLN中。这个过程允许模型逐步适应新的环境和物体,而无需完全重新训练。
关键创新:论文的关键创新在于提出了MLN-CLA算法,该算法能够实现MLN的增量学习。与传统的MLN学习方法相比,MLN-CLA能够有效地利用已有的知识,避免了从头训练的需要,从而提高了学习效率。此外,MLN-CLA还能够处理零样本可供性推理问题,即在没有见过某个物体的情况下,也能推断出该物体的可供性。
关键设计:MLN-CLA算法的关键设计包括:1. 使用MLN来建模可供性知识,MLN能够有效地表示物体、动作和环境之间的关系。2. 设计了一种知识更新机制,该机制能够识别需要更新的知识,并仅对这些知识进行重新训练。3. 使用了一种知识集成方法,该方法能够将更新后的知识集成到现有的MLN中,而不会破坏已有的知识。
🖼️ 关键图片

📊 实验亮点
实验结果表明,MLN-CLA算法在累积学习和零样本可供性推理方面优于现有的基线方法。具体来说,MLN-CLA算法在累积学习任务中,能够达到与从头训练的MLN相当的性能,但训练时间大大缩短。在零样本可供性推理任务中,MLN-CLA算法能够有效地推断出未见过的物体的可供性,其性能优于其他基线方法。
🎯 应用场景
该研究成果可应用于各种机器人应用场景,例如家庭服务机器人、工业机器人和自动驾驶汽车。通过增量学习可供性,机器人能够更好地理解其周围环境,并能够更灵活地完成各种任务。例如,家庭服务机器人可以学习如何使用新的工具,工业机器人可以适应新的生产线,自动驾驶汽车可以识别新的交通标志。
📄 摘要(原文)
Affordances enable robots to have a semantic understanding of their surroundings. This allows them to have more acting flexibility when completing a given task. Capturing object affordances in a machine learning model is a difficult task, because of their dependence on contextual information. Markov Logic Networks (MLN) combine probabilistic reasoning with logic that is able to capture such context. Mobile robots operate in partially known environments wherein unseen object affordances can be observed. This new information must be incorporated into the existing knowledge, without having to retrain the MLN from scratch. We introduce the MLN Cumulative Learning Algorithm (MLN-CLA). MLN-CLA learns new relations in various knowledge domains by retaining knowledge and only updating the changed knowledge, for which the MLN is retrained. We show that MLN-CLA is effective for accumulative learning and zero-shot affordance inference, outperforming strong baselines.