RoboMorph: Evolving Robot Morphology using Large Language Models
作者: Kevin Qiu, Władysław Pałucki, Krzysztof Ciebiera, Paweł Fijałkowski, Marek Cygan, Łukasz Kuciński
分类: cs.LG, cs.RO
发布日期: 2024-07-11 (更新: 2025-04-16)
💡 一句话要点
RoboMorph:利用大语言模型进化机器人形态
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人设计 模块化机器人 大型语言模型 进化算法 强化学习
📋 核心要点
- 传统机器人设计耗时且计算量大,难以有效探索广阔的设计空间。
- RoboMorph利用LLM的强大能力,结合进化算法,自动生成和优化模块化机器人设计。
- 实验表明,RoboMorph能够针对不同地形生成优化的机器人,并在进化过程中不断改进机器人形态。
📝 摘要(中文)
本文介绍了一种名为RoboMorph的自动化方法,用于生成和优化模块化机器人设计,该方法结合了大型语言模型(LLMs)和进化算法。在该框架中,每个机器人设计都表示为一个语法,并利用LLMs的能力来探索广泛的机器人设计空间,而传统上这需要耗费大量时间和计算资源。通过引入最佳示例提示技术和基于强化学习的控制算法,RoboMorph通过反馈循环迭代地改进机器人设计。实验结果表明,RoboMorph成功生成了针对不同地形优化的非平凡机器人,并展示了机器人形态在连续进化中的改进。我们的方法突出了使用LLMs进行数据驱动的模块化机器人设计的潜力,提供了一种有前景的方法,可以扩展到具有类似设计框架的其他领域。
🔬 方法详解
问题定义:论文旨在解决模块化机器人设计中设计空间巨大、探索效率低下的问题。现有方法通常依赖人工设计或计算密集型的优化算法,难以快速生成适应不同环境的机器人形态。这些方法的痛点在于缺乏有效的搜索策略和对设计空间的理解,导致设计过程耗时且成本高昂。
核心思路:RoboMorph的核心思路是利用大型语言模型(LLMs)的生成和推理能力,将机器人设计表示为语法,并使用LLMs来探索和优化这些语法。通过进化算法,不断迭代改进机器人设计,使其适应特定的任务和环境。这种方法将LLMs作为一种智能设计工具,能够快速生成多样化的机器人形态,并根据反馈进行优化。
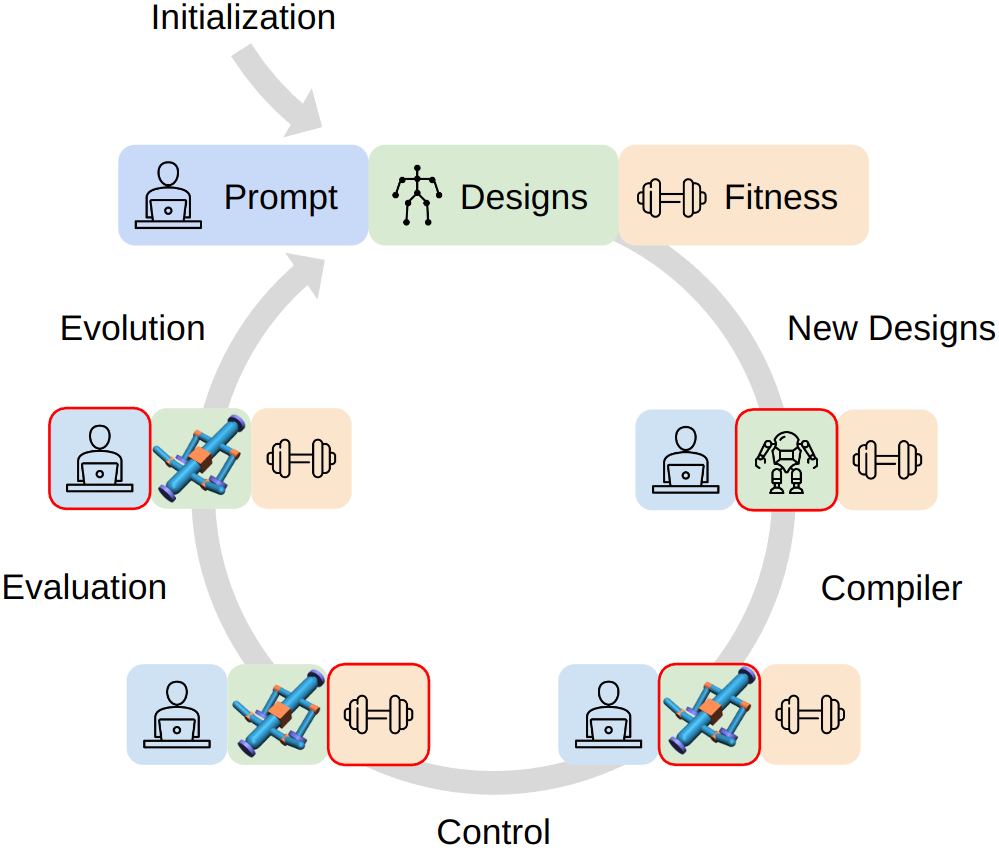
技术框架:RoboMorph的整体框架包括以下几个主要模块:1) 机器人设计表示:将机器人形态表示为语法规则。2) LLM驱动的设计生成:使用LLM根据语法规则生成初始机器人设计。3) 强化学习控制:使用强化学习算法训练机器人控制器,评估机器人的性能。4) 进化算法优化:使用进化算法根据机器人性能迭代改进设计,并使用最佳示例提示技术引导LLM生成更优的设计。
关键创新:RoboMorph的关键创新在于将LLMs引入到模块化机器人设计中,并结合进化算法和强化学习,实现了一个自动化的机器人设计流程。与传统方法相比,RoboMorph能够更有效地探索设计空间,生成更优的机器人形态。最佳示例提示技术和强化学习控制算法的结合,使得机器人设计能够根据实际性能进行迭代优化。
关键设计:RoboMorph的关键设计包括:1) 机器人形态的语法表示:定义了机器人模块的类型和连接方式,以及生成机器人结构的语法规则。2) 最佳示例提示技术:通过向LLM提供高质量的机器人设计示例,引导LLM生成更优的设计。3) 强化学习奖励函数:设计了能够反映机器人性能的奖励函数,用于训练机器人控制器和评估机器人设计。
🖼️ 关键图片


📊 实验亮点
实验结果表明,RoboMorph能够成功生成针对不同地形优化的非平凡机器人。通过连续进化,机器人形态得到了显著改进。与传统方法相比,RoboMorph能够更有效地探索设计空间,生成性能更优的机器人。具体性能数据未知,但论文强调了在机器人形态上的改进。
🎯 应用场景
RoboMorph具有广泛的应用前景,可用于快速生成适应不同环境和任务的机器人。例如,在灾难救援中,可以快速设计出能够穿越复杂地形的机器人;在太空探索中,可以设计出适应极端环境的机器人。此外,该方法还可以应用于其他模块化设计领域,如建筑设计、产品设计等,具有重要的实际价值和未来影响。
📄 摘要(原文)
We introduce RoboMorph, an automated approach for generating and optimizing modular robot designs using large language models (LLMs) and evolutionary algorithms. In this framework, we represent each robot design as a grammar and leverage the capabilities of LLMs to navigate the extensive robot design space, which is traditionally time-consuming and computationally demanding. By introducing a best-shot prompting technique and a reinforcement learning-based control algorithm, RoboMorph iteratively improves robot designs through feedback loops. Experimental results demonstrate that RoboMorph successfully generates nontrivial robots optimized for different terrains while showcasing improvements in robot morphology over successive evolutions. Our approach highlights the potential of using LLMs for data-driven, modular robot design, providing a promising methodology that can be extended to other domains with similar design frameworks.