Learning Temporal Logic Predicates from Data with Statistical Guarantees
作者: Emi Soroka, Rohan Sinha, Sanjay Lall
分类: cs.LG, cs.AI, cs.LO
发布日期: 2024-06-15 (更新: 2025-04-28)
备注: As submitted to L4DC 2025
💡 一句话要点
提出一种基于数据学习时序逻辑谓词并提供统计保证的新方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 时序逻辑 谓词学习 共形预测 表达式优化 统计保证
📋 核心要点
- 现有方法在从数据中学习时序逻辑谓词时,缺乏对学习到的谓词正确性的保证,这是一个关键挑战。
- 该论文的核心思想是结合表达式优化和共形预测,在统计保证下学习时序逻辑谓词。
- 实验结果表明,该方法在模拟轨迹数据集上表现良好,并通过消融实验验证了各模块的有效性。
📝 摘要(中文)
时序逻辑规则常用于控制和机器人领域,为轨迹数据提供结构化、可解释的描述。这些规则在形式化方法安全验证、约束自主体运动规划和数据分类等领域有广泛应用。然而,现有的时序逻辑谓词学习方法无法保证结果谓词的正确性。本文提出了一种从数据中学习时序逻辑谓词并提供有限样本正确性保证的新方法。该方法利用表达式优化和共形预测,在温和的统计假设下学习能够正确描述未来轨迹的谓词。实验结果表明,该方法在模拟轨迹数据集上表现良好,并通过消融研究分析了算法各组成部分对性能的贡献。
🔬 方法详解
问题定义:论文旨在解决从轨迹数据中学习时序逻辑谓词的问题,并为学习到的谓词提供统计上的正确性保证。现有方法的痛点在于,它们无法提供关于学习到的谓词在未来轨迹上的泛化能力的保证,这限制了它们在安全关键型应用中的使用。
核心思路:论文的核心思路是结合表达式优化和共形预测。表达式优化用于搜索合适的时序逻辑谓词,而共形预测用于估计学习到的谓词在未来轨迹上的置信度。通过这种方式,可以学习到既能很好地拟合训练数据,又能提供统计保证的谓词。
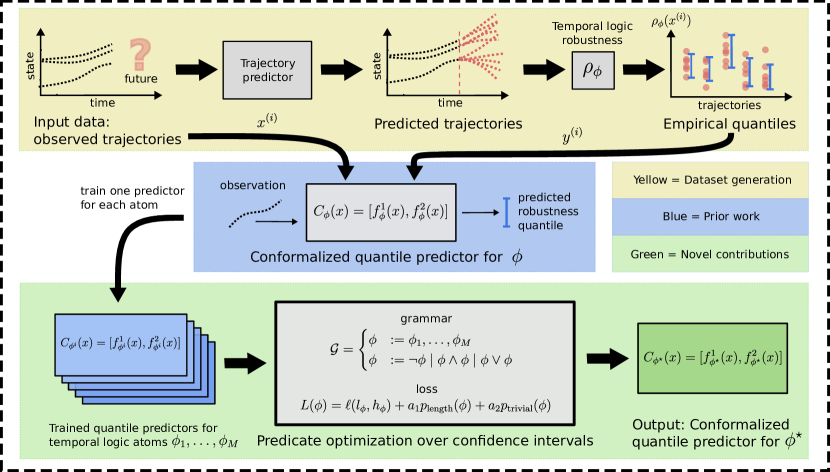
技术框架:该方法包含以下主要步骤:1) 数据预处理:将轨迹数据转换为适合表达式优化的格式。2) 表达式优化:使用优化算法搜索满足给定时序逻辑模板的谓词。3) 共形预测:使用共形预测框架估计学习到的谓词在未来轨迹上的置信度。4) 谓词选择:根据置信度和拟合程度选择最佳谓词。
关键创新:该论文的关键创新在于将共形预测引入到时序逻辑谓词学习中,从而为学习到的谓词提供了统计保证。与现有方法相比,该方法不仅能够学习到能够很好地拟合训练数据的谓词,而且能够提供关于谓词在未来轨迹上的泛化能力的保证。
关键设计:表达式优化部分可能使用遗传算法或梯度下降等方法。共形预测部分需要选择合适的非相似性度量和置信度水平。谓词选择部分需要权衡谓词的拟合程度和置信度,例如使用加权平均或 Pareto 前沿等方法。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法在模拟轨迹数据集上能够有效地学习到时序逻辑谓词,并提供有限样本正确性保证。消融研究表明,表达式优化和共形预测是该方法性能的关键组成部分。具体的性能数据(例如,学习到的谓词的准确率、置信度等)未知,但摘要表明该方法表现良好。
🎯 应用场景
该研究成果可应用于机器人、自动驾驶、航空航天等领域,用于安全关键系统的验证和控制。例如,可以利用学习到的时序逻辑谓词来验证自动驾驶系统的安全性,或者约束无人机的运动规划,确保其满足特定的安全规范。该方法还可以用于轨迹数据分类,例如识别异常行为或预测系统故障。
📄 摘要(原文)
Temporal logic rules are often used in control and robotics to provide structured, human-interpretable descriptions of trajectory data. These rules have numerous applications including safety validation using formal methods, constraining motion planning among autonomous agents, and classifying data. However, existing methods for learning temporal logic predicates from data do not provide assurances about the correctness of the resulting predicate. We present a novel method to learn temporal logic predicates from data with finite-sample correctness guarantees. Our approach leverages expression optimization and conformal prediction to learn predicates that correctly describe future trajectories under mild statistical assumptions. We provide experimental results showing the performance of our approach on a simulated trajectory dataset and perform ablation studies to understand how each component of our algorithm contributes to its performance.