Constraint-Aware Diffusion Models for Trajectory Optimization
作者: Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
分类: cs.LG, cs.RO
发布日期: 2024-06-03
💡 一句话要点
提出约束感知扩散模型,用于解决轨迹优化中的约束违反问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 扩散模型 轨迹优化 约束优化 机器人运动规划 深度学习
📋 核心要点
- 现有扩散模型在轨迹优化中易产生预测误差,导致约束违反,如目标未达成或发生碰撞。
- 提出约束感知扩散模型,通过混合损失函数,在训练时显式地最小化约束违反。
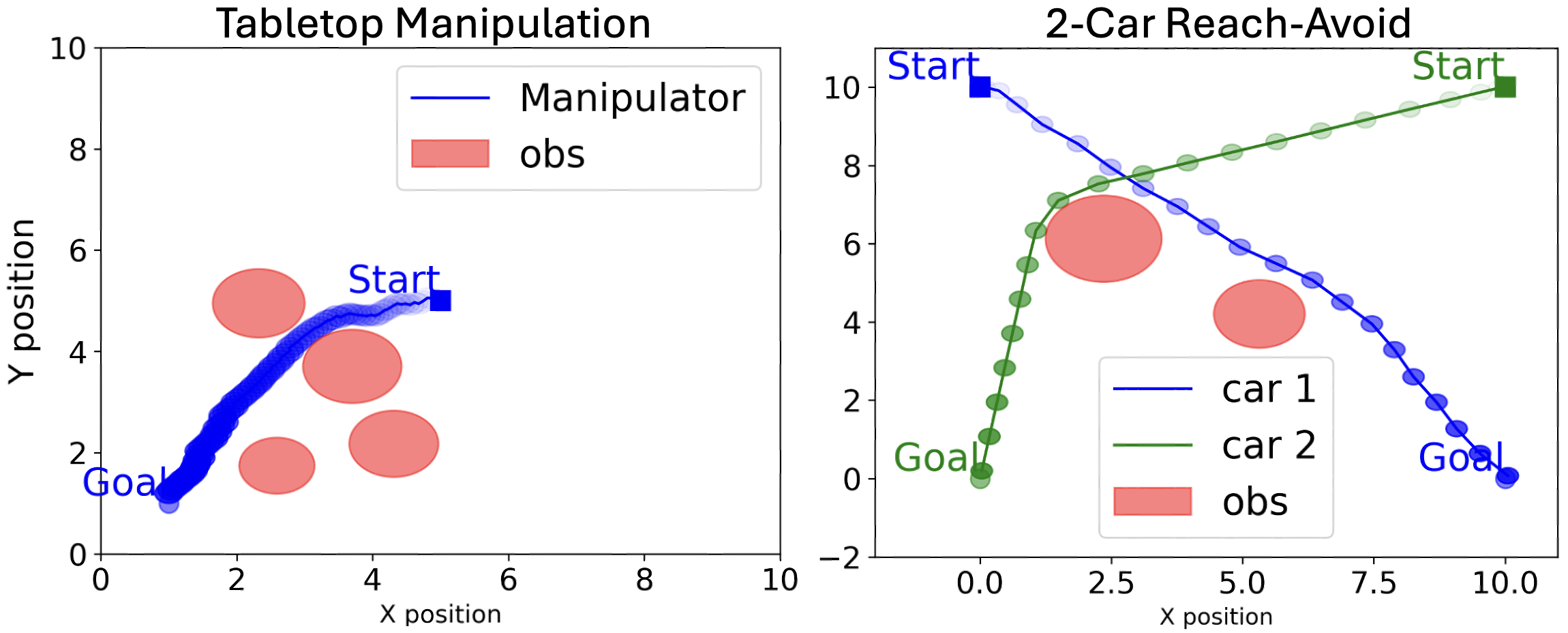
- 实验表明,该模型在桌面操作和双车避障问题上,能有效减少约束违反,并生成接近最优解的轨迹。
📝 摘要(中文)
扩散模型在轨迹优化问题中展现了生成高质量和多样化解的能力。然而,基于神经网络的扩散模型不可避免地会产生预测误差,导致约束违反,例如未满足目标或发生碰撞。本文提出了一种新颖的约束感知扩散模型用于轨迹优化。我们引入了一种新的混合损失函数进行训练,该函数在恢复原始数据分布的同时,最小化扩散样本相对于真实值的约束违反。我们的模型在桌面操作和双车避障问题上进行了演示,在最小化约束违反的同时生成接近局部最优解的样本,优于传统的扩散模型。
🔬 方法详解
问题定义:论文旨在解决轨迹优化问题中,传统扩散模型由于预测误差导致的约束违反问题。具体来说,即使扩散模型能够生成多样化的轨迹,这些轨迹可能无法满足预设的约束条件,例如到达目标位置、避免碰撞等。现有方法的痛点在于缺乏对约束的显式建模和优化,导致生成的轨迹可行性较低。
核心思路:论文的核心思路是在扩散模型的训练过程中,引入约束违反的惩罚项,从而引导模型生成满足约束条件的轨迹。通过设计一种混合损失函数,同时考虑数据分布的恢复和约束违反的最小化,使得模型能够在生成高质量轨迹的同时,保证轨迹的可行性。
技术框架:该方法基于标准的扩散模型框架,主要包括前向扩散过程和反向生成过程。在前向扩散过程中,逐步向轨迹数据添加噪声,直至完全变为噪声。在反向生成过程中,从噪声出发,逐步去除噪声,恢复出原始轨迹。关键在于训练阶段,使用混合损失函数来指导反向生成过程,使其生成的轨迹既符合数据分布,又满足约束条件。
关键创新:最重要的技术创新点在于提出了约束感知的混合损失函数。该损失函数由两部分组成:一部分是标准的扩散模型损失,用于恢复原始数据分布;另一部分是约束违反损失,用于惩罚违反约束的轨迹。这种混合损失函数能够显式地引导模型学习满足约束条件的轨迹生成策略。与现有方法的本质区别在于,现有方法通常只关注数据分布的恢复,而忽略了约束条件的重要性。
关键设计:混合损失函数的设计是关键。具体而言,约束违反损失通常采用某种形式的距离度量,例如轨迹与障碍物之间的最小距离,或者轨迹与目标位置之间的距离。这些距离度量可以根据具体的应用场景进行选择。此外,混合损失函数中两个部分的权重也需要仔细调整,以平衡数据分布恢复和约束违反最小化之间的关系。具体的网络结构未知,但可以推测使用了神经网络来参数化扩散模型的去噪过程。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该约束感知扩散模型在桌面操作和双车避障问题上,显著降低了约束违反的程度,同时保持了生成轨迹的多样性。与传统扩散模型相比,该模型能够生成更安全、更可靠的轨迹,更接近局部最优解。具体的性能提升数据未知,但摘要中明确指出优于传统扩散模型。
🎯 应用场景
该研究成果可广泛应用于机器人运动规划、自动驾驶、游戏AI等领域。例如,在机器人操作中,可以生成满足避障、末端执行器姿态等约束的轨迹;在自动驾驶中,可以生成满足交通规则、安全距离等约束的行驶轨迹。该方法能够提高轨迹优化算法的实用性和可靠性,加速相关技术的落地应用。
📄 摘要(原文)
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.