D3MAS: Decompose, Deduce, and Distribute for Enhanced Knowledge Sharing in Multi-Agent Systems
作者: Heng Zhang, Yuling Shi, Xiaodong Gu, Haochen You, Zijian Zhang, Lubin Gan, Yilei Yuan, Jin Huang
分类: cs.GR
发布日期: 2026-02-28
💡 一句话要点
D3MAS:通过分解、推导与分发增强多智能体系统中的知识共享
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体系统 知识共享 知识冗余 协同推理 分布式记忆
📋 核心要点
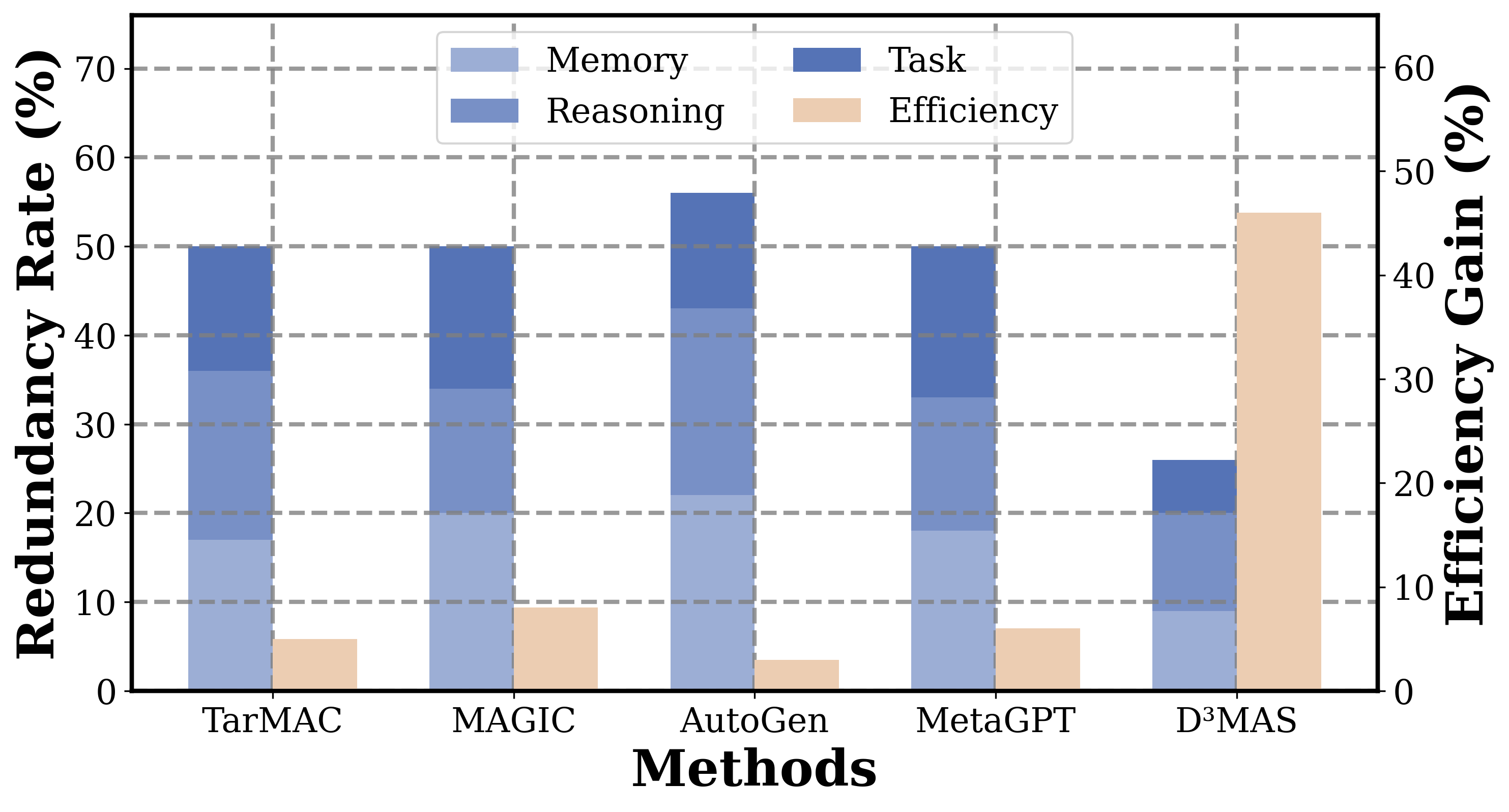
- 现有基于LLM的多智能体系统存在知识冗余,导致智能体重复检索和推理,效率低下。
- D3MAS框架通过分解任务、协同推理和分布式记忆,确保智能体共享最少且充分的信息。
- 实验结果表明,D3MAS能显著提高推理准确率(8.7%-15.6%)并降低知识冗余(平均46%)。
📝 摘要(中文)
基于大型语言模型的多智能体系统在协同问题解决方面表现出强大的能力。然而,这些系统存在严重的知识冗余问题,智能体在检索和推理过程中重复工作。这种低效源于一个更深层的问题:当前的架构缺乏确保智能体在每个操作阶段共享最少充分信息的机制。实证分析表明,智能体通信中的平均知识重复率高达47.3%。我们提出了D3MAS(分解、推导和分发),一个分层协调框架,通过结构设计而非显式优化来解决冗余问题。该框架组织跨三个协调层的协作:任务分解尽早过滤掉不相关的子问题;协同推理捕获智能体之间互补的推理路径;分布式记忆提供对非冗余知识的访问。这些层通过统一异构图中的结构化消息传递进行协调。这种跨层对齐确保信息与实际任务需求保持一致。在四个具有挑战性的数据集上的实验表明,D3MAS始终将推理准确率提高8.7%到15.6%,并将知识冗余平均降低46%。
🔬 方法详解
问题定义:论文旨在解决多智能体系统中普遍存在的知识冗余问题。现有方法缺乏有效的机制来确保智能体之间共享最少且充分的信息,导致重复的检索和推理工作,降低了整体效率。这种冗余不仅浪费计算资源,也阻碍了智能体之间的有效协作。
核心思路:D3MAS的核心思路是通过分层协调框架,在任务分解、协同推理和知识存储三个层面进行优化,从而减少知识冗余。该框架强调结构设计,而非显式的优化算法,旨在从根本上解决信息冗余问题,提高多智能体系统的效率和准确性。
技术框架:D3MAS框架包含三个主要层:任务分解层、协同推理层和分布式记忆层。任务分解层负责将复杂任务分解为更小的子任务,并过滤掉不相关的子问题。协同推理层利用不同智能体的互补推理路径,进行协同推理。分布式记忆层提供对非冗余知识的访问,避免重复存储和检索。这三层通过统一的异构图进行协调,实现结构化消息传递。
关键创新:D3MAS的关键创新在于其分层协调的结构设计,通过任务分解、协同推理和分布式记忆三个层面,系统性地减少知识冗余。与现有方法相比,D3MAS不是简单地优化信息共享过程,而是从根本上改变了信息的组织和传递方式,确保每个智能体只接收和处理必要的信息。
关键设计:D3MAS使用异构图来表示任务、智能体和知识之间的关系,并使用结构化消息传递机制在不同层之间传递信息。具体的参数设置、损失函数和网络结构等技术细节在论文中未详细说明,属于未知信息。
🖼️ 关键图片


📊 实验亮点
实验结果表明,D3MAS在四个具有挑战性的数据集上均取得了显著的性能提升。具体而言,D3MAS将推理准确率提高了8.7%到15.6%,并将知识冗余平均降低了46%。这些数据表明,D3MAS在减少知识冗余和提高推理准确率方面具有显著优势。
🎯 应用场景
D3MAS框架可应用于各种需要多智能体协同解决问题的场景,例如智能交通系统、分布式机器人协作、金融风险管理、供应链优化等。通过减少知识冗余和提高推理准确率,D3MAS能够提升系统的整体效率和可靠性,具有重要的实际应用价值和广阔的未来发展前景。
📄 摘要(原文)
Multi-agent systems powered by large language models exhibit strong capabilities in collaborative problem-solving. However, these systems suffer from substantial knowledge redundancy. Agents duplicate efforts in retrieval and reasoning processes. This inefficiency stems from a deeper issue: current architectures lack mechanisms to ensure agents share minimal sufficient information at each operational stage. Empirical analysis reveals an average knowledge duplication rate of 47.3\% across agent communications. We propose D3MAS (Decompose, Deduce, and Distribute), a hierarchical coordination framework addressing redundancy through structural design rather than explicit optimization. The framework organizes collaboration across three coordinated layers. Task decomposition filters irrelevant sub-problems early. Collaborative reasoning captures complementary inference paths across agents. Distributed memory provides access to non-redundant knowledge. These layers coordinate through structured message passing in a unified heterogeneous graph. This cross-layer alignment ensures information remains aligned with actual task needs. Experiments on four challenging datasets show that D3MAS consistently improves reasoning accuracy by 8.7\% to 15.6\% and reduces knowledge redundancy by 46\% on average.