MimicKit: A Reinforcement Learning Framework for Motion Imitation and Control
作者: Xue Bin Peng
分类: cs.GR, cs.LG, cs.RO
发布日期: 2025-10-15 (更新: 2026-01-18)
🔗 代码/项目: GITHUB
💡 一句话要点
MimicKit:用于动作模仿和控制的强化学习开源框架
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 运动模仿 强化学习 运动控制 开源框架 计算机图形学
📋 核心要点
- 现有动作模仿和强化学习方法缺乏统一的训练框架,阻碍了研究和应用在不同角色和任务上的扩展。
- MimicKit提供了一个模块化、易配置的框架,集成了常用动作模仿技术和强化学习算法,支持自定义角色和任务。
- MimicKit通过提供标准化的环境、代理和数据结构,简化了运动控制器的训练流程,促进了计算机图形学和机器人领域的研究。
📝 摘要(中文)
MimicKit是一个开源框架,用于使用动作模仿和强化学习训练运动控制器。该代码库提供了常用动作模仿技术和强化学习算法的实现。该框架旨在通过提供统一的训练框架以及标准化的环境、代理和数据结构,来支持计算机图形学和机器人领域的研究和应用。该代码库被设计为模块化且易于配置,从而可以方便地修改和扩展到新的角色和任务。开源代码库可在以下网址获得:https://github.com/xbpeng/MimicKit。
🔬 方法详解
问题定义:论文旨在解决运动模仿和控制领域中,缺乏统一、易扩展的训练框架的问题。现有方法往往针对特定角色和任务设计,难以复用和推广,限制了研究效率和应用范围。
核心思路:MimicKit的核心思路是构建一个模块化的、可配置的强化学习框架,将常用的动作模仿技术和强化学习算法集成在一起,并提供标准化的环境、代理和数据结构。通过这种方式,研究人员可以方便地修改和扩展框架,以适应不同的角色和任务。
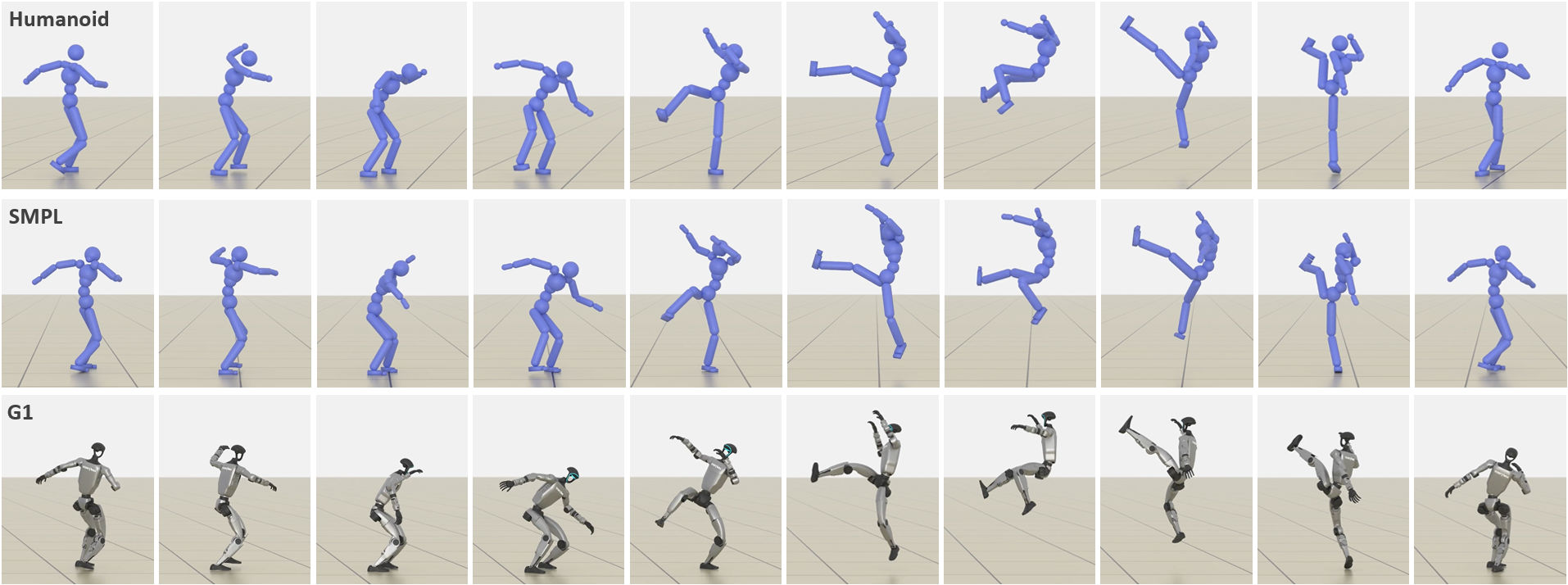
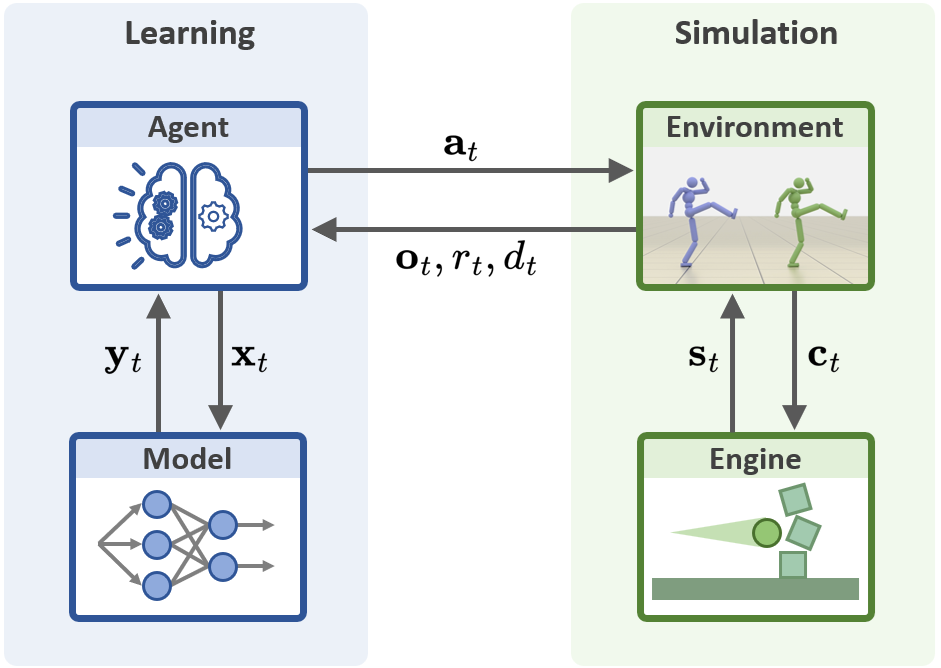
技术框架:MimicKit框架包含以下主要模块:1) 环境模块:提供标准化的运动环境,包括角色模型、物理引擎等;2) 代理模块:实现各种运动控制器,如基于动作模仿的控制器和基于强化学习的控制器;3) 数据模块:提供标准化的运动数据格式,方便数据的读取和处理;4) 训练模块:实现各种训练算法,如模仿学习算法和强化学习算法。整个训练流程包括:首先,从运动数据中学习动作模仿策略;然后,使用强化学习算法对策略进行优化,以提高运动的鲁棒性和适应性。
关键创新:MimicKit的关键创新在于其模块化和可配置的设计。通过将不同的模块解耦,研究人员可以方便地替换或修改其中的任何一个模块,而无需修改整个框架。此外,MimicKit还提供了标准化的接口和数据格式,方便不同模块之间的交互和数据的共享。
关键设计:MimicKit的关键设计包括:1) 使用PyTorch作为底层框架,方便模型的构建和训练;2) 提供了一系列常用的损失函数,如动作模仿损失、状态匹配损失等;3) 支持多种强化学习算法,如PPO、DDPG等;4) 采用模块化的网络结构,方便模型的扩展和修改。
🖼️ 关键图片

📊 实验亮点
由于论文主要介绍框架本身,并未提供具体的实验结果。但其开源特性和模块化设计,为后续研究提供了便利,用户可以在此框架上进行各种运动模仿和强化学习算法的实验,并与其他基线方法进行比较,以验证算法的有效性和优越性。框架本身的设计也便于性能分析和优化。
🎯 应用场景
MimicKit可应用于计算机图形学和机器人等领域,例如:1) 虚拟角色的动作生成和控制;2) 机器人的运动规划和控制;3) 游戏中的角色动画;4) 电影中的特效制作。该框架的开源特性将促进相关领域的研究和应用,加速运动控制技术的进步。
📄 摘要(原文)
MimicKit is an open-source framework for training motion controllers using motion imitation and reinforcement learning. The codebase provides implementations of commonly-used motion-imitation techniques and RL algorithms. This framework is intended to support research and applications in computer graphics and robotics by providing a unified training framework, along with standardized environment, agent, and data structures. The codebase is designed to be modular and easily configurable, enabling convenient modification and extension to new characters and tasks. The open-source codebase is available at: https://github.com/xbpeng/MimicKit.