GS-Share: Enabling High-fidelity Map Sharing with Incremental Gaussian Splatting
作者: Xinran Zhang, Hanqi Zhu, Yifan Duan, Yanyong Zhang
分类: cs.GR
发布日期: 2025-10-03
备注: 11 pages, 11 figures
💡 一句话要点
GS-Share:通过增量高斯溅射实现高保真地图共享
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D地图共享 高斯溅射 增量更新 虚拟图像 自动驾驶
📋 核心要点
- 现有3D地图共享系统在高保真度、持续更新和网络效率方面存在挑战,难以满足实际应用需求。
- GS-Share通过基于锚点的全局地图构建、虚拟图像增强和增量更新,实现了高保真、紧凑的地图共享。
- 实验表明,GS-Share在保真度上优于现有方法,尤其是在外推视图上,同时显著降低了地图传输开销。
📝 摘要(中文)
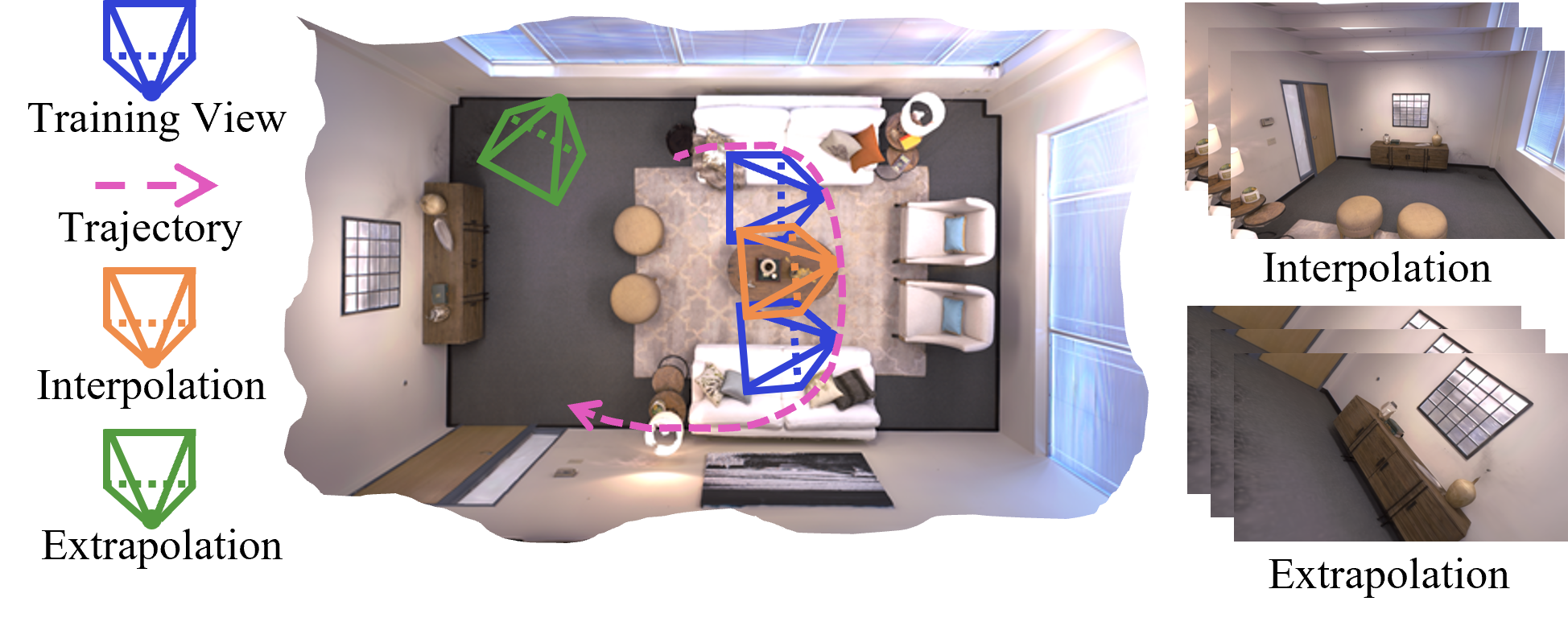
构建和共享3D地图对于自动驾驶和增强现实等诸多应用至关重要。 近年来,3D高斯溅射已成为一种有前景的精确3D重建方法。 然而,一个具有高保真度、持续更新和网络效率的实用地图共享系统仍然难以实现。 为了应对这些挑战,我们推出了GS-Share,这是一个具有紧凑表示的逼真地图共享系统。 GS-Share的核心包括基于锚点的全局地图构建、基于虚拟图像的地图增强和增量地图更新。 我们将GS-Share与最先进的方法进行了评估,结果表明我们的系统实现了更高的保真度,尤其是在外推视图方面,PSNR、LPIPS和深度L1分别提高了11%、22%和74%。 此外,GS-Share更加紧凑,减少了36%的地图传输开销。
🔬 方法详解
问题定义:现有3D地图共享方法在高保真度、持续更新和网络效率之间难以取得平衡。具体来说,重建质量不高,尤其是在未观测区域;地图更新不及时,无法适应环境变化;地图数据量大,传输开销高昂。这些问题限制了3D地图共享在自动驾驶、增强现实等领域的应用。
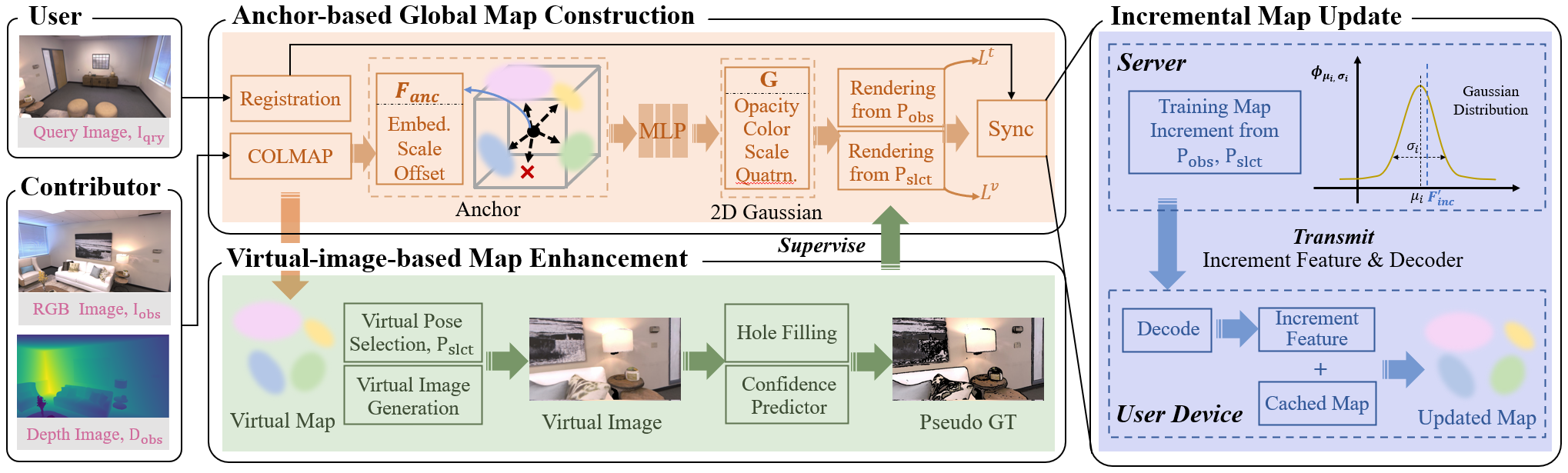
核心思路:GS-Share的核心思路是利用3D高斯溅射(3D Gaussian Splatting)进行场景重建,并通过一系列优化策略来实现高保真、紧凑且可增量更新的地图表示。通过锚点机制实现全局一致性,利用虚拟图像增强未观测区域的重建质量,并采用增量更新策略来高效地适应环境变化。
技术框架:GS-Share系统主要包含三个阶段:1) 基于锚点的全局地图构建:选择关键帧作为锚点,构建全局一致的3D高斯模型。2) 基于虚拟图像的地图增强:利用渲染的虚拟图像来优化未观测区域的高斯参数,提高重建质量。3) 增量地图更新:检测环境变化,仅更新受影响的高斯参数,减少传输开销。
关键创新:GS-Share的关键创新在于将3D高斯溅射与锚点机制、虚拟图像增强和增量更新策略相结合,从而在保真度、紧凑性和可更新性之间取得了良好的平衡。与现有方法相比,GS-Share能够生成更高质量的地图,尤其是在外推视图方面,同时显著降低了地图传输开销。
关键设计:在锚点选择方面,采用基于信息增益的关键帧选择策略。在虚拟图像生成方面,使用渲染方程模拟不同视角下的图像。在增量更新方面,采用基于高斯参数变化的更新策略,仅更新变化超过阈值的高斯参数。损失函数包括渲染损失、深度损失和正则化项,用于优化高斯参数。
🖼️ 关键图片

📊 实验亮点
GS-Share在多个数据集上进行了评估,实验结果表明,GS-Share在保真度方面显著优于现有方法,PSNR、LPIPS和深度L1分别提高了11%、22%和74%。同时,GS-Share的地图大小比现有方法减少了36%,显著降低了地图传输开销。这些结果表明,GS-Share在实际应用中具有很高的价值。
🎯 应用场景
GS-Share可广泛应用于自动驾驶、增强现实、机器人导航等领域。在自动驾驶中,它可以实现高精度地图的构建和共享,提高车辆的感知能力和定位精度。在增强现实中,它可以提供逼真的3D场景,增强用户的沉浸式体验。在机器人导航中,它可以帮助机器人构建环境地图,实现自主导航和避障。该研究有望推动这些领域的发展,并带来更智能、更便捷的生活体验。
📄 摘要(原文)
Constructing and sharing 3D maps is essential for many applications, including autonomous driving and augmented reality. Recently, 3D Gaussian splatting has emerged as a promising approach for accurate 3D reconstruction. However, a practical map-sharing system that features high-fidelity, continuous updates, and network efficiency remains elusive. To address these challenges, we introduce GS-Share, a photorealistic map-sharing system with a compact representation. The core of GS-Share includes anchor-based global map construction, virtual-image-based map enhancement, and incremental map update. We evaluate GS-Share against state-of-the-art methods, demonstrating that our system achieves higher fidelity, particularly for extrapolated views, with improvements of 11%, 22%, and 74% in PSNR, LPIPS, and Depth L1, respectively. Furthermore, GS-Share is significantly more compact, reducing map transmission overhead by 36%.