Visualizing Spatial Point Clouds: A Task-Oriented Taxonomy
作者: Mahsa Partovi, Federico Iuricich
分类: cs.GR
发布日期: 2025-10-03
备注: 12 pages, 3 figures, 1 table
💡 一句话要点
提出面向任务的三维点云可视化分类法,提升可视化效果和可解释性
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 三维点云可视化 任务导向 分类法 自动驾驶 环境监测
📋 核心要点
- 现有三维点云可视化方法缺乏系统性的设计,难以有效支持各种分析任务,例如目标识别和结构分析。
- 论文提出一种面向任务的三维点云可视化分类法,旨在弥合可视化技术与分析目标之间的差距,提升可视化效果。
- 该分类法涵盖了过去四十年的可视化设计选择,并将其与现代应用中的挑战联系起来,为未来的研究奠定基础。
📝 摘要(中文)
三维点云数据的可视化在自动导航、环境监测和灾害响应等领域至关重要,这些领域中的目标识别、结构分析和时空探索等任务依赖于清晰有效的视觉表示。尽管人工智能驱动的处理技术取得了进展,但可视化仍然是解释复杂空间数据集的关键工具。然而,由于数据的稀疏性、密度变化和尺度等问题,设计有效的点云可视化面临着巨大的挑战。本文分析了空间点云可视化的设计空间,强调了系统地将可视化技术映射到分析目标方面的差距。我们提出了一种分类法,对过去四十年来的可视化设计选择进行分类,并将它们与现代应用中的基本挑战联系起来。通过基于数据类型、用户目标和可视化技术来构建可视化策略,我们的框架为推进更有效、可解释和以用户为中心的可视化技术奠定了基础。
🔬 方法详解
问题定义:论文旨在解决三维点云可视化设计缺乏系统性,难以满足不同分析任务需求的问题。现有方法往往针对特定应用场景,缺乏通用性和可扩展性,难以应对点云数据的稀疏性、密度变化和尺度差异等挑战。
核心思路:论文的核心思路是构建一个面向任务的三维点云可视化分类法,将可视化技术与分析目标联系起来,从而指导可视化设计。通过对现有可视化方法的分析和归纳,识别出关键的设计选择,并将其映射到不同的数据类型、用户目标和可视化技术上。
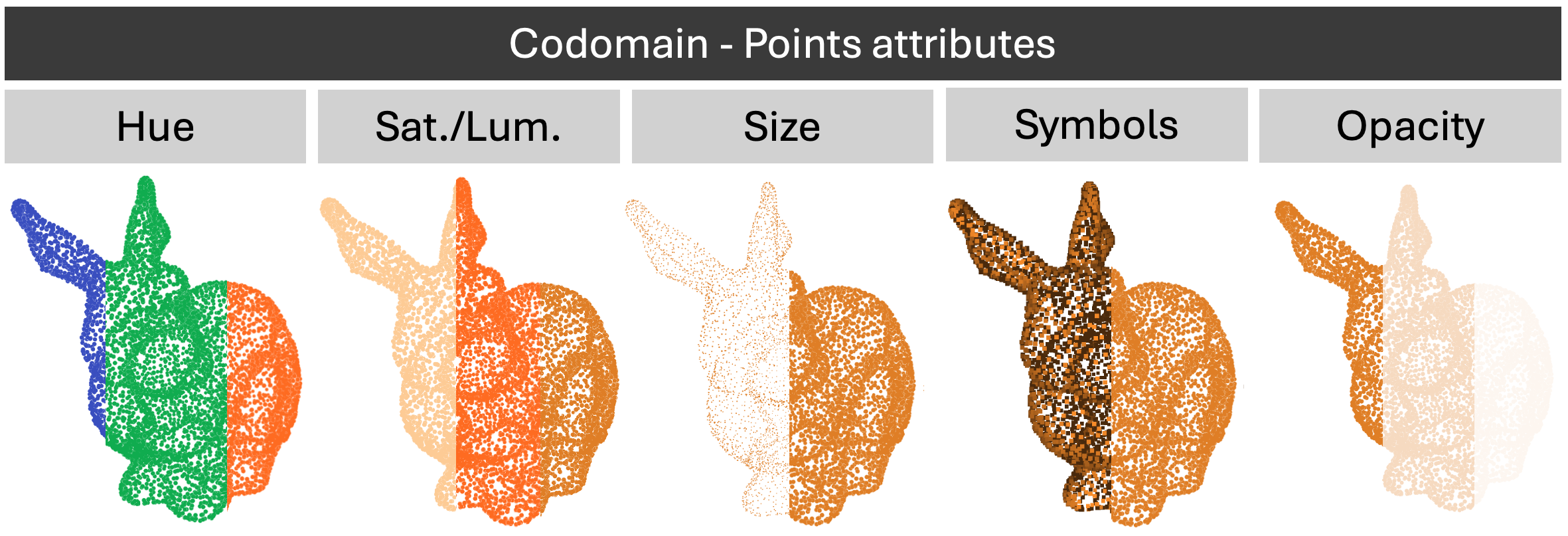
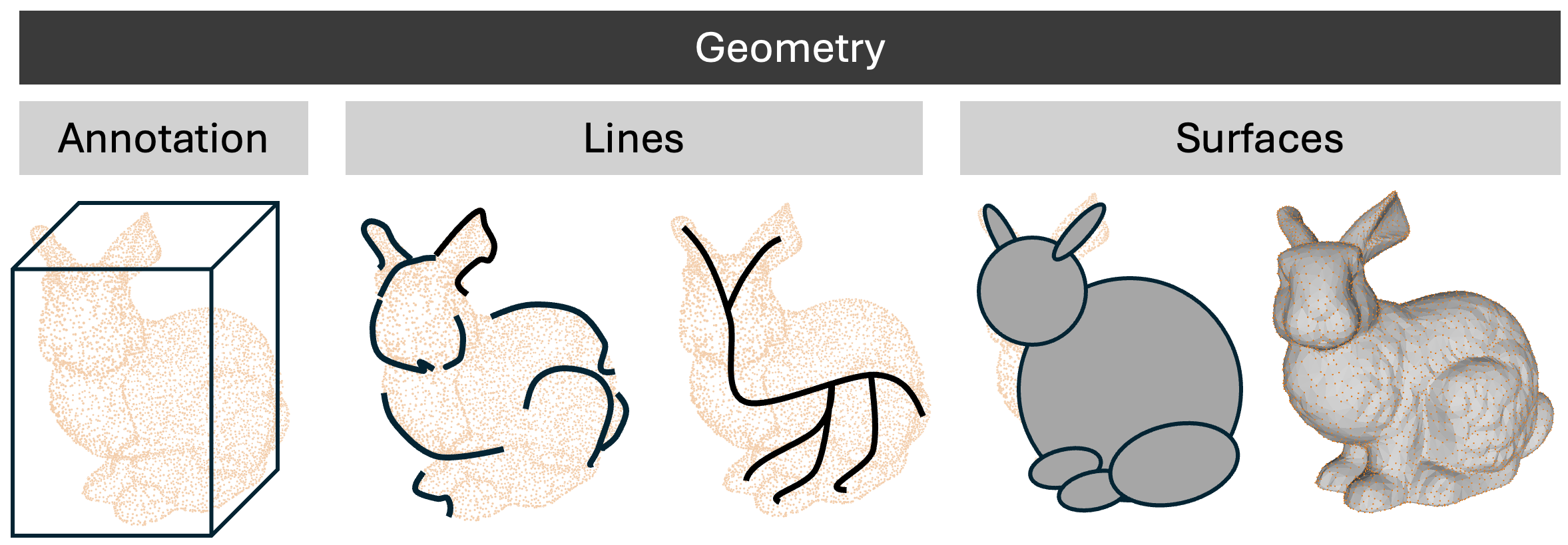
技术框架:论文构建的分类法包含以下几个主要组成部分:1) 数据类型:对点云数据的特征进行分类,例如几何特征、颜色特征、语义特征等;2) 用户目标:定义不同的分析任务,例如目标识别、结构分析、时空探索等;3) 可视化技术:对现有的可视化方法进行分类,例如点渲染、表面重建、体渲染等。通过将这三个组成部分进行关联,可以为特定的分析任务选择合适的可视化技术。
关键创新:论文的关键创新在于提出了一个面向任务的三维点云可视化分类法,该分类法能够系统地组织和分析现有的可视化方法,并为未来的可视化设计提供指导。与现有方法相比,该分类法更加通用和可扩展,能够应对不同应用场景和数据类型的挑战。
关键设计:论文的关键设计包括:1) 对数据类型、用户目标和可视化技术进行细致的分类;2) 建立数据类型、用户目标和可视化技术之间的映射关系;3) 提供可视化设计指南,帮助用户选择合适的可视化技术。
🖼️ 关键图片

📊 实验亮点
论文的主要贡献在于提出了一个面向任务的三维点云可视化分类法,该分类法对过去四十年的可视化设计选择进行了系统性的分析和归纳,并将其与现代应用中的挑战联系起来。该分类法为未来的可视化设计提供了指导,有助于提升可视化效果和可解释性。论文未提供具体的性能数据或对比基线。
🎯 应用场景
该研究成果可广泛应用于自动驾驶、环境监测、灾害响应等领域。例如,在自动驾驶中,可以利用该分类法设计更有效的点云可视化方法,帮助驾驶员或自动驾驶系统更好地理解周围环境。在环境监测中,可以利用该分类法可视化大规模点云数据,从而更好地分析环境变化。在灾害响应中,可以利用该分类法可视化灾害现场的点云数据,帮助救援人员更好地了解灾情。
📄 摘要(原文)
The visualization of 3D point cloud data is essential in fields such as autonomous navigation, environmental monitoring, and disaster response, where tasks like object recognition, structural analysis, and spatiotemporal exploration rely on clear and effective visual representation. Despite advancements in AI-driven processing, visualization remains a critical tool for interpreting complex spatial datasets. However, designing effective point cloud visualizations presents significant challenges due to the sparsity, density variations, and scale of the data. In this work, we analyze the design space of spatial point cloud visualization, highlighting a gap in systematically mapping visualization techniques to analytical objectives. We introduce a taxonomy that categorizes four decades of visualization design choices, linking them to fundamental challenges in modern applications. By structuring visualization strategies based on data types, user objectives, and visualization techniques, our framework provides a foundation for advancing more effective, interpretable, and user-centered visualization techniques.