Aerial Path Planning for Urban Geometry and Texture Co-Capture
作者: Weidan Xiong, Bochuan Zeng, Ziyu Hu, Jianwei Guo, Ke Xie, Hui Huang
分类: cs.GR, cs.CV
发布日期: 2025-09-26
备注: ACM TOG and SIGGRAPH Asia 2025 (Patent Protected); Project page: https://vcc.tech/research/2025/DroneTex
DOI: 10.1145/3763292
💡 一句话要点
提出城市几何与纹理协同重建的无人机路径规划方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 无人机路径规划 三维重建 纹理质量评估 城市建模 多目标优化
📋 核心要点
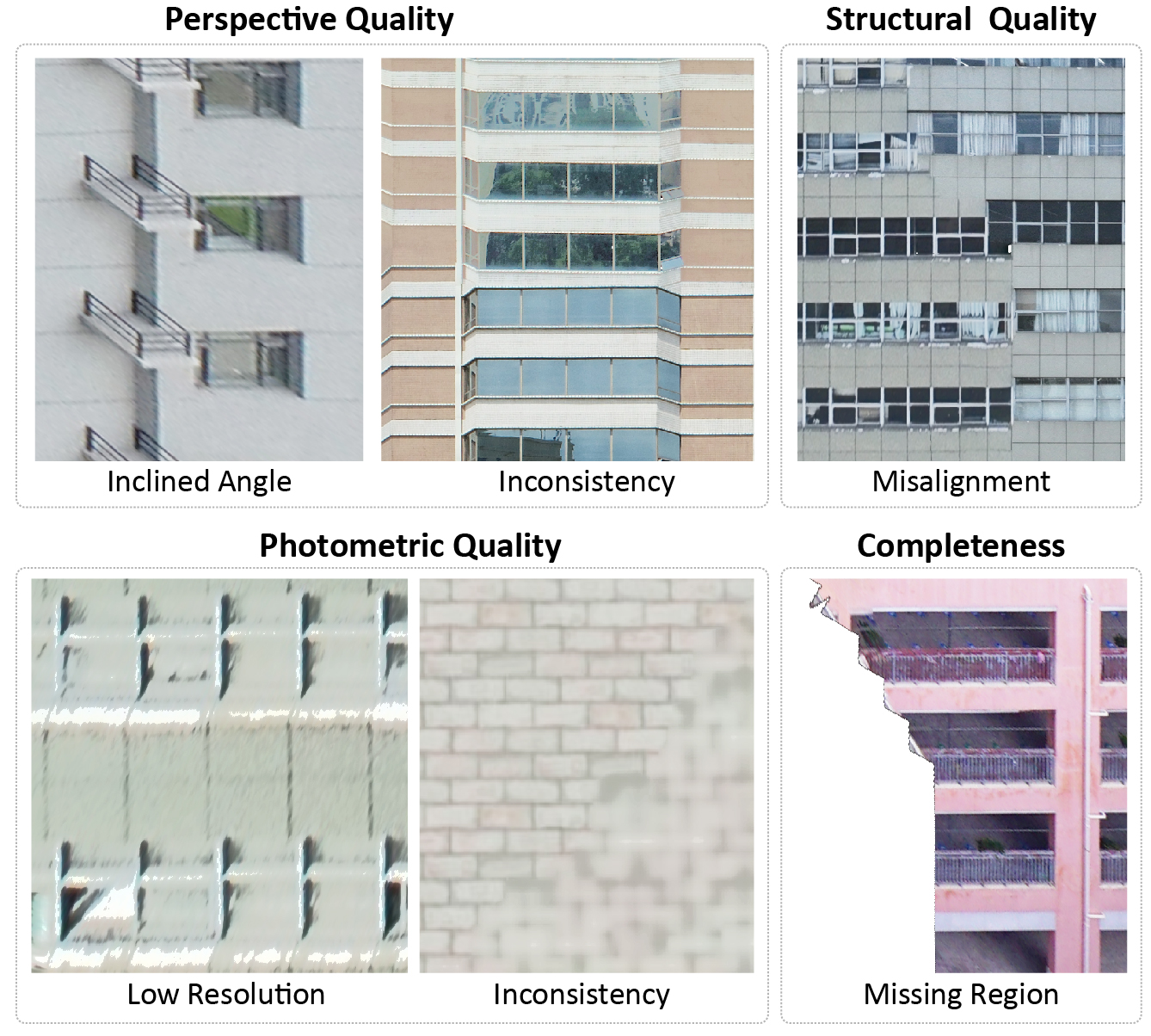
- 现有城市重建技术通常忽略纹理质量,导致重建模型存在明显的视觉伪影,难以满足高质量重建需求。
- 提出一种无人机路径规划框架,通过优化视点,协同捕获高质量的几何结构和高保真纹理信息。
- 在合成和真实数据集上验证了该方法的有效性,能够以较低的成本生成高质量的纹理化城市模型。
📝 摘要(中文)
本文针对城市场景重建中几何结构和纹理质量协同优化问题,提出了一种新的无人机路径规划框架。该框架在仅知目标区域的2D建筑轮廓图和安全飞行高度的条件下,能够生成高质量的图像,用于重建结构化的几何模型和高保真纹理。为了评估和指导视点规划,本文设计了一个综合的纹理质量评估系统,包括两个针对建筑立面的新指标。该方法生成高质量的垂直倾斜视图和水平平面视图,以有效捕获几何和纹理细节。此外,提出了一种多目标优化策略,以联合最大化纹理保真度、提高几何精度并最小化飞行成本。最后,提出了一种考虑纹理一致性的序列路径规划算法。在合成和真实城市数据集上的大量实验表明,该方法能够有效地生成适用于并发几何和纹理重建的图像集,从而以低运营成本创建逼真的纹理场景代理。
🔬 方法详解
问题定义:现有城市三维重建方法在无人机路径规划时,往往只关注几何结构的重建质量,忽略了纹理质量的重要性。这导致重建后的模型在纹理细节上存在模糊、扭曲等问题,影响了最终的视觉效果。因此,本文旨在解决如何在无人机路径规划中同时优化几何结构和纹理质量的问题。
核心思路:本文的核心思路是通过设计一种能够同时考虑几何结构和纹理质量的无人机路径规划算法,从而生成适合高质量三维重建的图像序列。该算法通过优化无人机的飞行路径和拍摄角度,使得拍摄的图像既能够提供足够的几何信息,又能够保证纹理的清晰度和一致性。
技术框架:该方法主要包含以下几个阶段:1) 输入2D建筑轮廓图和安全飞行高度;2) 生成垂直倾斜视图和水平平面视图,以捕捉几何和纹理细节;3) 使用多目标优化策略,联合最大化纹理保真度、提高几何精度并最小化飞行成本;4) 使用序列路径规划算法,考虑纹理一致性。
关键创新:该方法最重要的创新点在于提出了一个综合的纹理质量评估系统,包括两个针对建筑立面的新指标。这些指标能够有效地评估图像的纹理质量,并指导无人机路径规划,从而生成高质量的纹理化三维模型。此外,多目标优化策略和序列路径规划算法也保证了重建的几何精度和纹理一致性。
关键设计:纹理质量评估系统包含两个新指标,用于评估建筑立面的纹理质量。多目标优化策略的目标函数包括纹理保真度、几何精度和飞行成本,通过调整权重系数来平衡各项指标。序列路径规划算法考虑了相邻图像之间的纹理一致性,避免出现明显的纹理跳变。
🖼️ 关键图片


📊 实验亮点
该方法在合成和真实城市数据集上进行了验证。实验结果表明,该方法能够有效地生成适用于并发几何和纹理重建的图像集,从而以低运营成本创建逼真的纹理场景代理。与传统方法相比,该方法能够显著提高重建模型的纹理质量,减少视觉伪影,提升用户体验。
🎯 应用场景
该研究成果可应用于智慧城市建设、城市规划、虚拟现实、游戏开发等领域。通过无人机自动采集城市影像数据,快速生成高质量的三维模型,为城市管理、规划决策、文化遗产保护等提供有力支持。同时,该技术也可用于创建逼真的虚拟城市环境,提升用户体验。
📄 摘要(原文)
Recent advances in image acquisition and scene reconstruction have enabled the generation of high-quality structural urban scene geometry, given sufficient site information. However, current capture techniques often overlook the crucial importance of texture quality, resulting in noticeable visual artifacts in the textured models. In this work, we introduce the urban geometry and texture co-capture problem under limited prior knowledge before a site visit. The only inputs are a 2D building contour map of the target area and a safe flying altitude above the buildings. We propose an innovative aerial path planning framework designed to co-capture images for reconstructing both structured geometry and high-fidelity textures. To evaluate and guide view planning, we introduce a comprehensive texture quality assessment system, including two novel metrics tailored for building facades. Firstly, our method generates high-quality vertical dipping views and horizontal planar views to effectively capture both geometric and textural details. A multi-objective optimization strategy is then proposed to jointly maximize texture fidelity, improve geometric accuracy, and minimize the cost associated with aerial views. Furthermore, we present a sequential path planning algorithm that accounts for texture consistency during image capture. Extensive experiments on large-scale synthetic and real-world urban datasets demonstrate that our approach effectively produces image sets suitable for concurrent geometric and texture reconstruction, enabling the creation of realistic, textured scene proxies at low operational cost.