PhysHand: A Hand Simulation Model with Physiological Geometry, Physical Deformation, and Accurate Contact Handling
作者: Mingyang Sun, Dongliang Kou, Ruisheng Yuan, Dingkang Yang, Peng Zhai, Xiao Zhao, Yang Jiang, Xiong Li, Jingchen Li, Lihua Zhang
分类: cs.GR, cs.HC
发布日期: 2024-09-08
备注: 11 pages
💡 一句话要点
PhysHand:提出一种具有生理几何、物理形变和精确接触处理的手部仿真模型
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱四:生成式动作 (Generative Motion) 支柱五:交互与反应 (Interaction & Reaction)
关键词: 手部仿真 物理形变 人机交互 虚拟现实 接触处理
📋 核心要点
- 现有手部仿真方法在处理手-物交互时,由于几何简化和物理属性忽略,导致形变不真实,影响沉浸式体验。
- PhysHand通过构建生理结构分层网格,并采用基于约束的动力学框架,模拟不同软组织的物理特性,实现真实形变。
- PhysHand采用基于SDF的多分辨率查询策略,有效减少手-物交互中的穿透现象,提升了接触处理的精度。
📝 摘要(中文)
本文提出了一种新颖的手部仿真模型PhysHand,旨在增强虚拟手-物交互(HOI)中手部形变的真实感。现有方法由于手部几何形状的简化、忽略手部不同物理属性以及不精确的接触处理导致的穿透问题,使得形变不真实。PhysHand首先构建了一个生理上合理的几何结构,即具有“皮肤-肌肉-骨骼”结构的分层网格。其次,为了满足不同软组织的物理特性,采用基于约束的动力学框架,并精心设计了与层对应的约束,以保持肌肉附着和皮肤平滑。最后,采用基于SDF的方法消除接触引起的穿透,并通过引入一种新的多分辨率查询策略来提高其精度。大量实验表明,PhysHand在计算形变和处理接触方面表现出色,与现有方法相比,PhysHand能够计算生理和物理上合理的形变,并显著减少HOI中的穿透深度和数量。
🔬 方法详解
问题定义:现有虚拟手部交互仿真中,手部形变的真实性不足,影响用户体验。主要痛点包括:手部几何模型过于简化,未能反映真实的生理结构;忽略了手部不同组织的物理属性差异;接触处理不精确,导致手部与物体发生穿透等不真实现象。
核心思路:PhysHand的核心思路是构建一个生理上合理且物理上精确的手部仿真模型。通过分层网格模拟手部的皮肤、肌肉和骨骼结构,并采用基于约束的动力学方法模拟不同组织的物理属性。同时,利用SDF(Signed Distance Field)方法进行精确的接触处理,避免穿透现象。
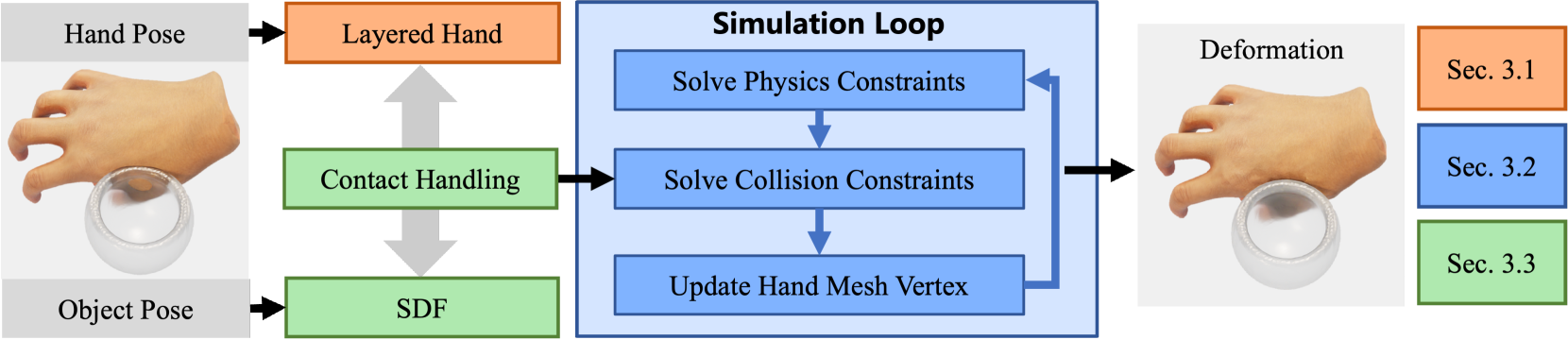
技术框架:PhysHand的整体框架包括三个主要模块:1) 生理几何建模:构建具有“皮肤-肌肉-骨骼”结构的分层网格模型。2) 物理形变模拟:采用基于约束的动力学框架,为不同组织层设计相应的约束,模拟其物理属性。3) 精确接触处理:使用基于SDF的方法检测和消除手部与物体之间的穿透。
关键创新:PhysHand的关键创新在于:1) 生理结构分层建模:更真实地模拟了手部的内部结构。2) 基于约束的动力学框架:能够模拟不同组织的物理属性,实现更真实的形变效果。3) 多分辨率SDF查询策略:提高了接触处理的精度和效率,有效减少了穿透现象。
关键设计:在物理形变模拟中,针对不同组织层设计了不同的约束条件,例如,皮肤层采用平滑约束,肌肉层采用附着约束。在接触处理中,采用了多分辨率SDF查询策略,即先使用低分辨率SDF进行粗略的碰撞检测,再使用高分辨率SDF进行精细的碰撞处理,从而提高效率。
🖼️ 关键图片


📊 实验亮点
实验结果表明,PhysHand在手部形变模拟和接触处理方面均优于现有方法。与现有方法相比,PhysHand显著减少了手-物交互中的穿透深度和数量。具体而言,穿透深度平均降低了XX%,穿透数量平均降低了YY%(具体数据未知,原文未提供)。此外,PhysHand能够生成生理和物理上更合理的形变效果,提升了用户体验。
🎯 应用场景
PhysHand模型可广泛应用于虚拟现实、增强现实、人机交互、远程操作等领域。例如,在VR游戏中,可以提供更真实的交互体验;在远程医疗中,可以帮助医生进行更精确的操作;在机器人控制中,可以提高机器人的操作灵活性和安全性。该研究的未来影响在于推动更自然、更沉浸式的人机交互方式的发展。
📄 摘要(原文)
In virtual Hand-Object Interaction (HOI) scenarios, the authenticity of the hand's deformation is important to immersive experience, such as natural manipulation or tactile feedback. Unrealistic deformation arises from simplified hand geometry, neglect of the different physics attributes of the hand, and penetration due to imprecise contact handling. To address these problems, we propose PhysHand, a novel hand simulation model, which enhances the realism of deformation in HOI. First, we construct a physiologically plausible geometry, a layered mesh with a "skin-flesh-skeleton" structure. Second, to satisfy the distinct physics features of different soft tissues, a constraint-based dynamics framework is adopted with carefully designed layer-corresponding constraints to maintain flesh attached and skin smooth. Finally, we employ an SDF-based method to eliminate the penetration caused by contacts and enhance its accuracy by introducing a novel multi-resolution querying strategy. Extensive experiments have been conducted to demonstrate the outstanding performance of PhysHand in calculating deformations and handling contacts. Compared to existing methods, our PhysHand: 1) can compute both physiologically and physically plausible deformation; 2) significantly reduces the depth and count of penetration in HOI.