SENC: Handling Self-collision in Neural Cloth Simulation
作者: Zhouyingcheng Liao, Sinan Wang, Taku Komura
分类: cs.GR, cs.CV
发布日期: 2024-07-17
备注: Accepted at ECCV 2024
💡 一句话要点
SENC:提出基于全局相交分析的自监督神经网络布料模拟方法,解决自碰撞问题
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 神经布料模拟 自碰撞处理 图神经网络 自监督学习 全局相交分析
📋 核心要点
- 现有布料模拟器难以处理自碰撞,因为碰撞检测方法要求无碰撞初始状态,而自监督学习需要随机初始化。
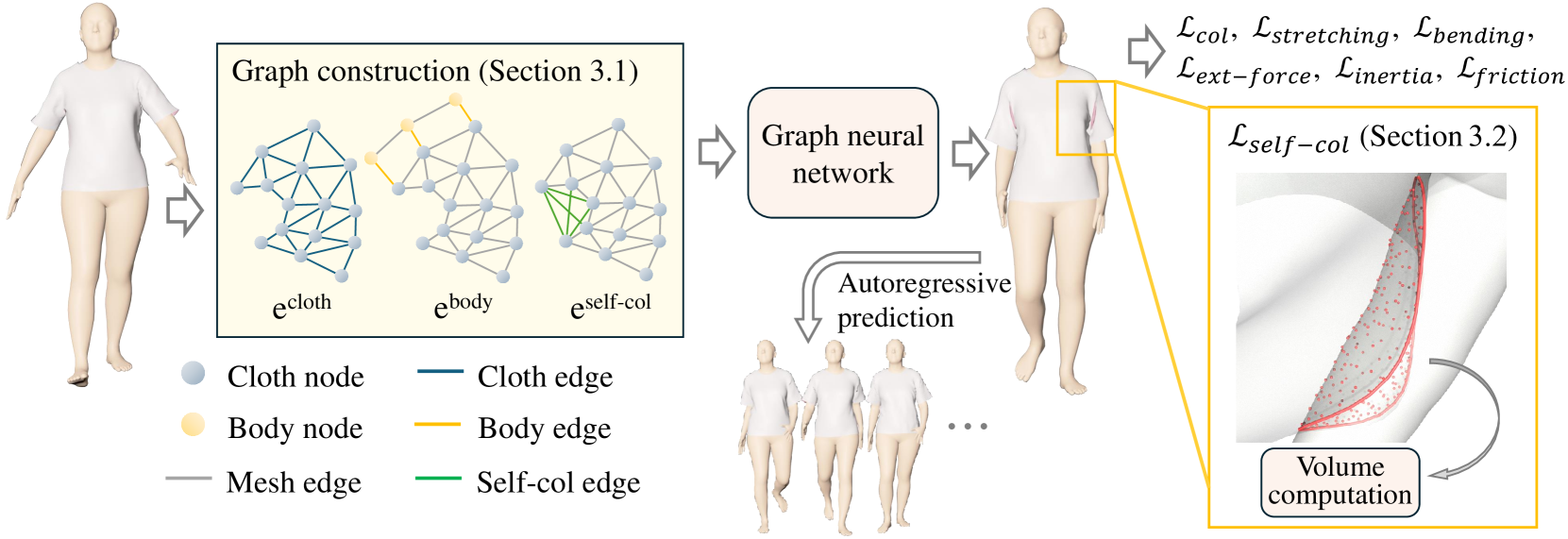
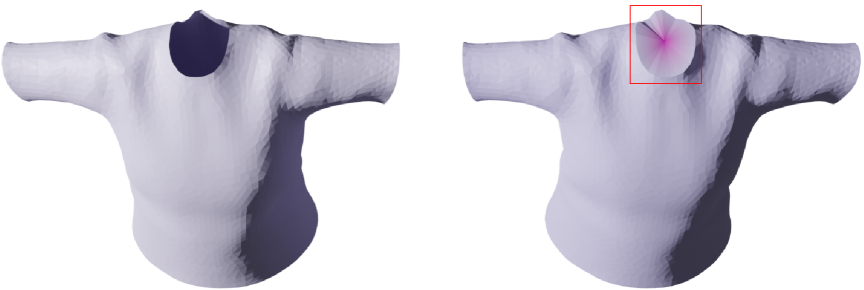
- SENC通过全局相交分析(GIA)计算布料穿透体积,并将其转化为损失函数,从而驱动网络学习避免自碰撞。
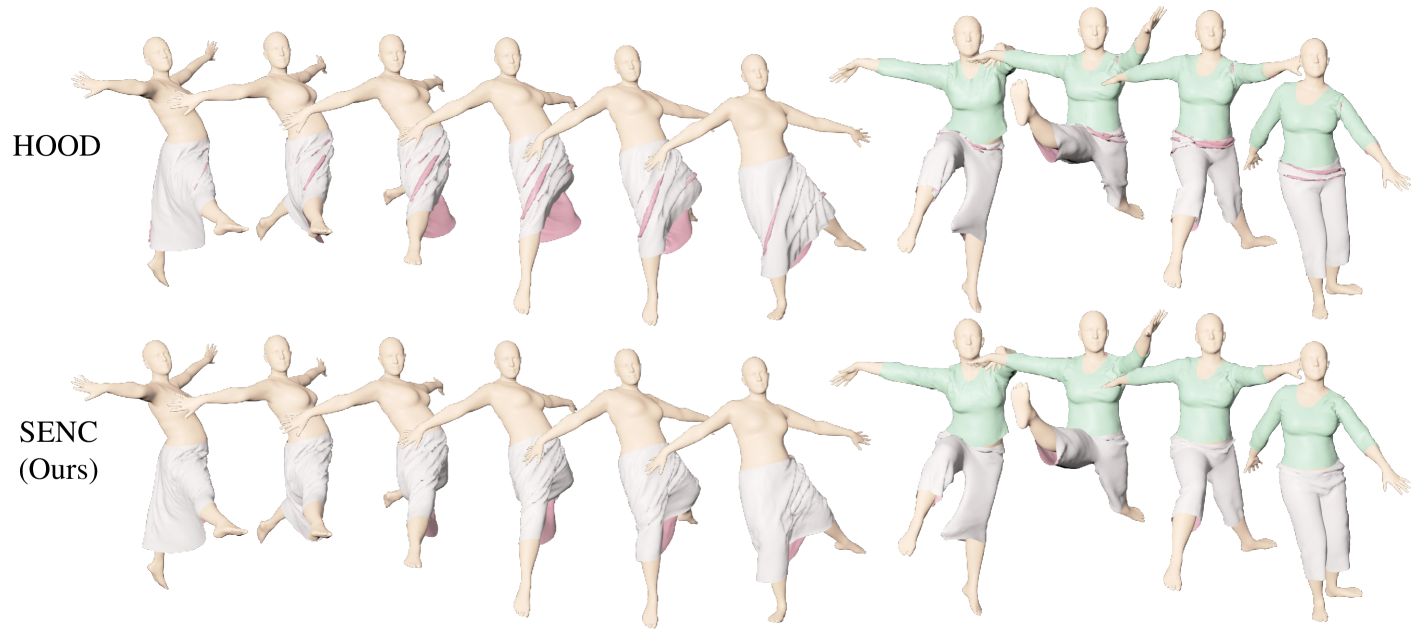
- 实验表明,SENC能有效减少布料自碰撞,同时保持动画质量,并能学习对随机外力的响应。
📝 摘要(中文)
本文提出了一种名为SENC的自监督神经网络布料模拟器,旨在解决布料自碰撞这一难题。由于现有碰撞检测与响应方法和自监督神经模拟器在模拟设置上存在差距,这个问题一直未能解决。前者需要无碰撞的初始设置,而后者需要在训练期间随机实例化布料。为了解决这个问题,我们提出了一种基于全局相交分析(GIA)的新型损失函数。该损失函数提取由形成穿透的布料区域包围的体积。通过构建基于该体积的能量,我们的自监督神经模拟器可以有效地解决布料自碰撞问题。此外,我们还开发了一种自碰撞感知图神经网络,该网络能够学习处理自碰撞,即使对于拓扑上彼此远离的部分也是如此。此外,我们引入了一种有效的外部力方案,使模拟能够学习布料在响应随机外部力时的行为。我们通过广泛的定量和定性实验验证了SENC的有效性,证明它可以有效地减少布料自碰撞,同时保持高质量的动画效果。
🔬 方法详解
问题定义:现有的神经布料模拟器在处理自碰撞问题时面临挑战。传统的碰撞检测方法通常需要一个无碰撞的初始状态,这与自监督学习中随机初始化布料的需求相悖。因此,如何让神经模拟器在训练过程中学习避免自碰撞,是一个亟待解决的问题。
核心思路:SENC的核心思路是利用全局相交分析(Global Intersection Analysis, GIA)来量化布料的自穿透程度。通过计算布料自穿透形成的体积,并将其转化为一个能量项,作为损失函数的一部分,从而引导神经网络学习避免自碰撞。这种方法无需预先进行碰撞检测,可以直接在随机初始化的布料上进行训练。
技术框架:SENC的整体框架包括一个图神经网络(GNN)作为核心模拟器,以及一个基于GIA的自碰撞损失函数。GNN负责学习布料的动力学行为,而GIA损失函数则负责惩罚自碰撞。此外,SENC还引入了一个外部力模块,用于模拟随机外力对布料的影响。整个训练过程是自监督的,不需要人工标注的数据。
关键创新:SENC的关键创新在于提出了基于GIA的自碰撞损失函数。与传统的碰撞检测方法不同,GIA直接分析布料的几何形状,计算自穿透体积,从而避免了对初始状态的限制。此外,SENC还设计了一个自碰撞感知的图神经网络,能够学习处理拓扑结构上距离较远的部位之间的自碰撞。
关键设计:GIA损失函数的具体形式是基于自穿透体积的能量函数。该能量函数的设计使得网络能够有效地减少自碰撞。图神经网络采用消息传递机制,允许节点之间传递信息,从而学习布料的全局动力学行为。外部力模块通过随机施加外力,增强了模型的泛化能力。
🖼️ 关键图片
📊 实验亮点
SENC通过定量和定性实验验证了其有效性。实验结果表明,SENC能够显著减少布料的自碰撞,同时保持高质量的动画效果。与现有的神经布料模拟器相比,SENC在自碰撞处理方面取得了显著的提升。具体指标未知,但论文强调了其在减少自碰撞方面的有效性。
🎯 应用场景
SENC可应用于虚拟服装设计、电影特效、游戏开发等领域。它能够生成更逼真、自然的布料动画,提高用户体验。此外,该方法还可以扩展到其他可变形物体的模拟中,例如头发、皮肤等。未来,SENC有望成为通用物理引擎的重要组成部分。
📄 摘要(原文)
We present SENC, a novel self-supervised neural cloth simulator that addresses the challenge of cloth self-collision. This problem has remained unresolved due to the gap in simulation setup between recent collision detection and response approaches and self-supervised neural simulators. The former requires collision-free initial setups, while the latter necessitates random cloth instantiation during training. To tackle this issue, we propose a novel loss based on Global Intersection Analysis (GIA). This loss extracts the volume surrounded by the cloth region that forms the penetration. By constructing an energy based on this volume, our self-supervised neural simulator can effectively address cloth self-collisions. Moreover, we develop a self-collision-aware graph neural network capable of learning to handle self-collisions, even for parts that are topologically distant from one another. Additionally, we introduce an effective external force scheme that enables the simulation to learn the cloth's behavior in response to random external forces. We validate the efficacy of SENC through extensive quantitative and qualitative experiments, demonstrating that it effectively reduces cloth self-collision while maintaining high-quality animation results.