Actuators À La Mode: Modal Actuations for Soft Body Locomotion
作者: Otman Benchekroun, Kaixiang Xie, Hsueh-Ti Derek Liu, Eitan Grinspun, Sheldon Andrews, Victor Zordan
分类: cs.GR
发布日期: 2024-05-28
备注: 15 pages, 14 figures
💡 一句话要点
提出基于模态驱动的软体运动框架,实现任意形变几何体的角色动画。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 软体动画 模态分析 角色驱动 物理模拟 运动优化
📋 核心要点
- 传统角色动画专注于具有刚性骨骼和双足/四足形态的角色,这限制了对任意可变形几何体的支持。
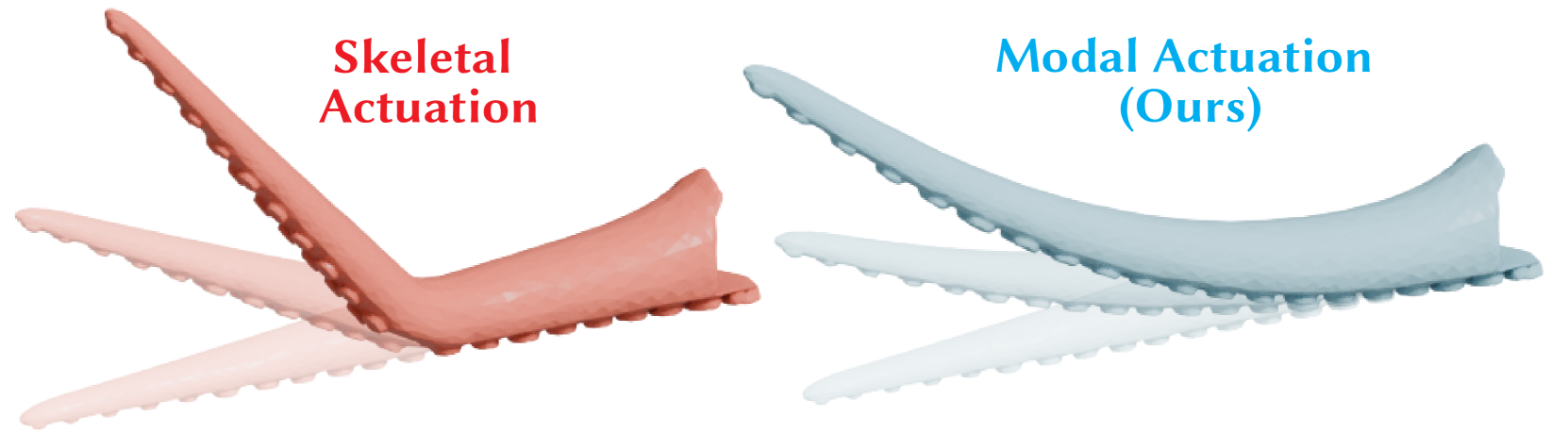
- 该论文利用角色几何体的自然振动模态构建时空驱动子空间,从而实现对软体的有效驱动。
- 通过将驱动与简化的软体模拟相结合,该方法能够处理高分辨率可变形角色的运动优化问题。
📝 摘要(中文)
本文提出了一种新颖的框架,用于生成具有任意形变几何体的角色的动画。该框架利用基于角色几何体自然振动模态构建的时空驱动子空间。由此产生的驱动与简化的快速软体模拟相结合,使我们能够构建一个易于处理的运动优化问题,适用于各种高分辨率可变形角色。
🔬 方法详解
问题定义:传统角色动画方法主要针对具有刚性骨骼的角色,对于任意可变形几何体的角色动画设计,尤其是在物理基础上进行动画设计,仍然是一个挑战。现有的方法难以有效地控制和驱动这些复杂的形变。
核心思路:该论文的核心思路是利用软体的自然振动模态来构建一个驱动子空间。通过控制这些模态的激活,可以有效地驱动软体的运动,而无需直接控制每一个顶点或单元。这种方法降低了控制的维度,使得优化过程更加可行。
技术框架:该框架主要包含以下几个阶段:1. 计算角色几何体的自然振动模态。2. 基于这些模态构建一个时空驱动子空间。3. 将该驱动子空间与一个简化的快速软体模拟器耦合。4. 通过优化算法,找到合适的驱动信号,从而实现期望的运动。
关键创新:该论文的关键创新在于将模态分析与软体驱动相结合。传统的软体动画通常需要直接控制大量的自由度,而该方法通过控制少量的模态系数,实现了对复杂形变的有效控制。此外,该方法还利用了简化的软体模拟器,提高了计算效率。
关键设计:论文中,模态的选取和驱动信号的优化是关键设计。模态的选择需要考虑其对运动的贡献程度,通常选择能量较高的模态。驱动信号的优化则需要设计合适的损失函数,以保证运动的自然性和符合物理规律。具体的参数设置和损失函数形式在论文中进行了详细描述。
🖼️ 关键图片


📊 实验亮点
该论文提出的方法能够有效地驱动具有任意形变几何体的角色,并生成自然的运动动画。通过与简化的软体模拟器相结合,该方法能够处理高分辨率的角色模型,并在可控的时间内完成运动优化。实验结果表明,该方法能够生成各种有趣的运动模式。
🎯 应用场景
该研究成果可应用于游戏、电影等领域的角色动画制作,尤其适用于需要表现具有复杂形变的角色,例如史莱姆、章鱼等。此外,该方法还可以应用于机器人领域,用于控制软体机器人的运动,使其能够适应复杂的环境。
📄 摘要(原文)
Traditional character animation specializes in characters with a rigidly articulated skeleton and a bipedal/quadripedal morphology. This assumption simplifies many aspects for designing physically based animations, like locomotion, but comes with the price of excluding characters of arbitrary deformable geometries. To remedy this, our framework makes use of a spatio-temporal actuation subspace built off of the natural vibration modes of the character geometry. The resulting actuation is coupled to a reduced fast soft body simulation, allowing us to formulate a locomotion optimization problem that is tractable for a wide variety of high resolution deformable characters.