Mani-GS: Gaussian Splatting Manipulation with Triangular Mesh
作者: Xiangjun Gao, Xiaoyu Li, Yiyu Zhuang, Qi Zhang, Wenbo Hu, Chaopeng Zhang, Yao Yao, Ying Shan, Long Quan
分类: cs.GR, cs.CV
发布日期: 2024-05-28 (更新: 2025-03-24)
备注: CVPR 2025. Project page here: https://gaoxiangjun.github.io/mani_gs/
💡 一句话要点
Mani-GS:利用三角网格操纵3D高斯溅射,实现可控高保真渲染
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱八:物理动画 (Physics-based Animation)
关键词: 3D高斯溅射 神经渲染 三角网格 场景操纵 可控渲染
📋 核心要点
- 现有NeRF方法在3D内容编辑和操纵方面存在不足,可控性差,训练和推理时间长,难以满足快速内容创作的需求。
- 提出利用三角网格直接操纵3D高斯溅射(3DGS)的方法,通过三角形形状感知的高斯绑定和自适应,实现可控且高质量的渲染。
- 实验结果表明,该方法能够处理大变形、局部操纵和软体模拟,同时保持高保真渲染,且对不精确网格具有鲁棒性。
📝 摘要(中文)
神经3D表示,如神经辐射场(NeRF),擅长生成照片级真实感的渲染结果,但缺乏操纵和编辑的灵活性,这对于内容创作至关重要。先前的工作试图通过在规范空间中变形NeRF或基于显式网格操纵辐射场来解决这个问题。然而,操纵NeRF的可控性不高,并且需要较长的训练和推理时间。随着3D高斯溅射(3DGS)的出现,可以使用显式的基于点的3D表示来实现极高保真度的新视角合成,并且训练和渲染速度更快。然而,仍然缺乏有效的方法来自由地操纵3DGS,同时保持渲染质量。在这项工作中,我们旨在应对实现可操纵的照片级真实感渲染的挑战。我们提出利用三角网格直接操纵具有自适应性的3DGS。这种方法减少了为不同类型的高斯操纵设计各种算法的需求。通过利用三角形形状感知的高斯绑定和自适应方法,我们可以实现3DGS操纵,并在操纵后保持高保真度渲染。我们的方法能够处理大的变形、局部操纵和软体模拟,同时保持高质量的渲染。此外,我们证明了我们的方法对于从3DGS中提取的不准确网格也是有效的。实验结果表明了我们方法的有效性及其相对于基线方法的优越性。
🔬 方法详解
问题定义:现有神经辐射场(NeRF)方法虽然能生成高质量的渲染结果,但在3D场景的操纵和编辑方面存在局限性。NeRF的隐式表示使得直接操纵困难,且需要耗时的训练和推理。3D高斯溅射(3DGS)虽然渲染速度快,但缺乏有效的操纵方法,难以进行灵活的场景编辑。因此,如何实现对3DGS的可控操纵,同时保持渲染质量,是一个亟待解决的问题。
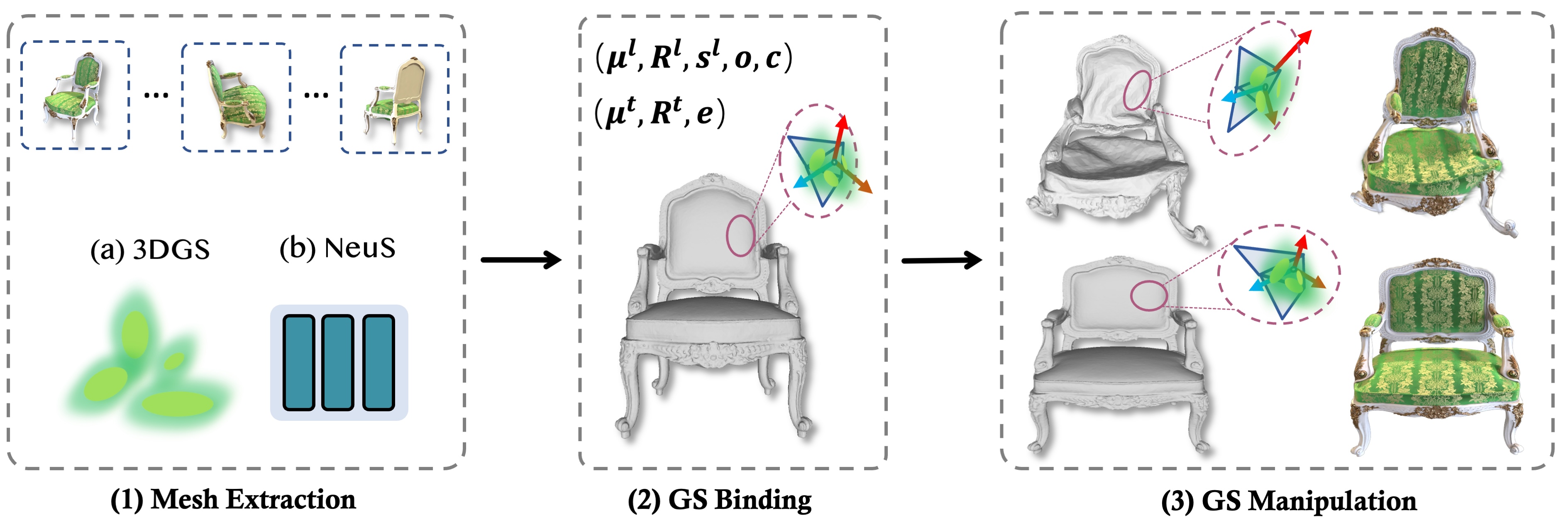
核心思路:论文的核心思路是利用三角网格作为3DGS操纵的代理。通过将3DGS中的高斯基元与三角网格的顶点进行绑定,网格的变形可以直接影响高斯基元的位置和属性。这种方法避免了直接操纵隐式表示的困难,并利用了网格的几何结构来指导高斯基元的变形,从而实现可控的操纵。
技术框架:该方法主要包含以下几个步骤:1) 从3DGS中提取三角网格;2) 将3DGS中的高斯基元与三角网格的顶点进行绑定,建立对应关系;3) 对三角网格进行操纵(例如,通过用户交互或软体模拟);4) 根据网格的变形,更新高斯基元的位置和属性;5) 使用更新后的高斯基元进行渲染。整个框架的关键在于高斯基元与网格顶点的绑定方式,以及如何根据网格变形自适应地调整高斯基元的属性。
关键创新:该方法最重要的创新点在于利用三角网格作为3DGS操纵的代理。与直接操纵高斯基元或隐式表示相比,这种方法具有更高的可控性和灵活性。此外,该方法还提出了三角形形状感知的高斯绑定方法,能够更好地保持高斯基元在变形过程中的形状和结构。
关键设计:在三角形形状感知的高斯绑定方法中,每个高斯基元被分配到其影响最大的三角形顶点上。当网格变形时,高斯基元的位置根据其绑定的顶点的位置变化进行更新。此外,高斯基元的协方差矩阵也根据网格的局部变形进行调整,以保持渲染质量。具体的损失函数设计未知,但目标是最小化操纵后的渲染误差,并保持高斯基元的形状和结构。
🖼️ 关键图片

📊 实验亮点
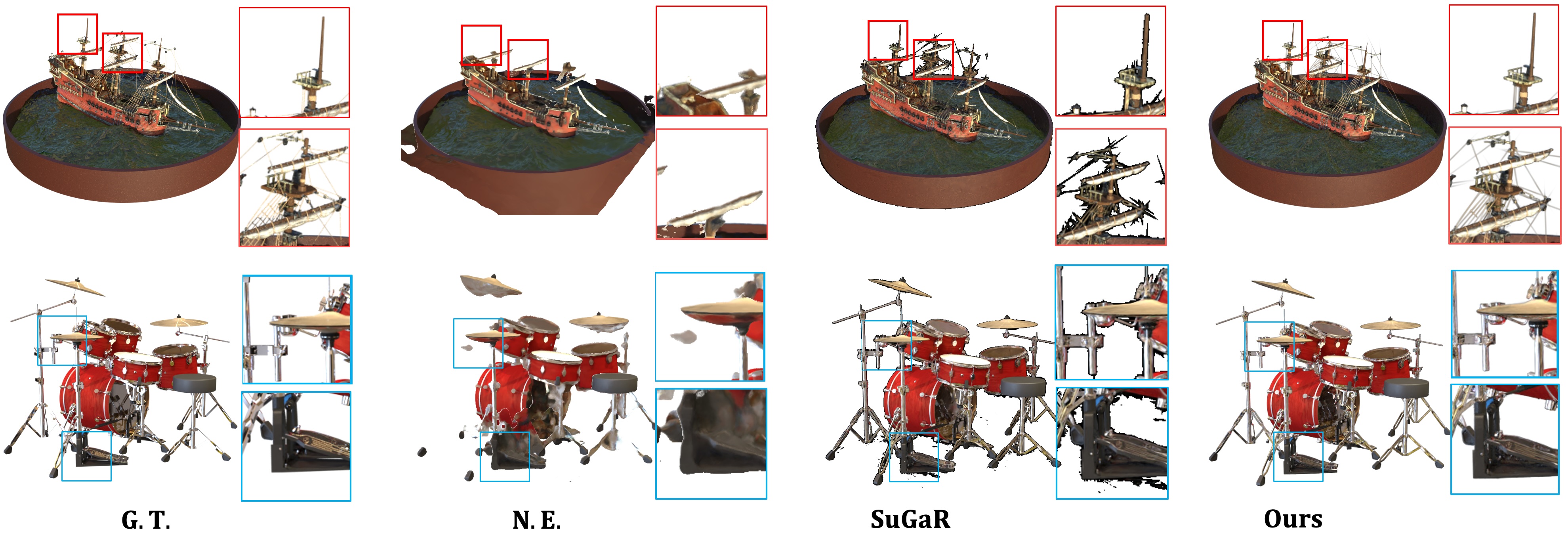
实验结果表明,该方法能够有效地操纵3DGS场景,并保持高保真度的渲染质量。与基线方法相比,该方法在处理大变形、局部操纵和软体模拟方面表现出更强的鲁棒性和更好的渲染效果。此外,该方法对于从3DGS中提取的不准确网格也具有一定的适应性,这表明该方法具有较强的实用性。具体的性能数据和提升幅度在论文中未明确给出。
🎯 应用场景
该研究成果可应用于虚拟现实/增强现实(VR/AR)内容创作、游戏开发、电影特效等领域。用户可以利用该方法对3D场景进行自由编辑和操纵,例如改变物体的形状、姿态,甚至进行软体模拟。该方法能够显著提高3D内容创作的效率和灵活性,并为用户提供更加逼真的交互体验。未来,该技术有望应用于机器人控制和远程操作等领域。
📄 摘要(原文)
Neural 3D representations such as Neural Radiance Fields (NeRF), excel at producing photo-realistic rendering results but lack the flexibility for manipulation and editing which is crucial for content creation. Previous works have attempted to address this issue by deforming a NeRF in canonical space or manipulating the radiance field based on an explicit mesh. However, manipulating NeRF is not highly controllable and requires a long training and inference time. With the emergence of 3D Gaussian Splatting (3DGS), extremely high-fidelity novel view synthesis can be achieved using an explicit point-based 3D representation with much faster training and rendering speed. However, there is still a lack of effective means to manipulate 3DGS freely while maintaining rendering quality. In this work, we aim to tackle the challenge of achieving manipulable photo-realistic rendering. We propose to utilize a triangular mesh to manipulate 3DGS directly with self-adaptation. This approach reduces the need to design various algorithms for different types of Gaussian manipulation. By utilizing a triangle shape-aware Gaussian binding and adapting method, we can achieve 3DGS manipulation and preserve high-fidelity rendering after manipulation. Our approach is capable of handling large deformations, local manipulations, and soft body simulations while keeping high-quality rendering. Furthermore, we demonstrate that our method is also effective with inaccurate meshes extracted from 3DGS. Experiments conducted demonstrate the effectiveness of our method and its superiority over baseline approaches.